この記事では、PIX4Dmapperにおける主要なコンピュータコンポーネントの使用方法について説明します。入力画像と処理オプションに応じてハードウェア構成が与える影響を明らかにするため、一連の実験を実施しました。.
まず、処理を成功させるためにどのハードウェアを購入すべきかを具体的に指定することはできません。パフォーマンスを向上させ、ボトルネックを回避するためには、バランスの取れた構成にすることが重要です。.
4つの主要構成要素は以下のとおりです。
- このソフトウェアは高度に並列化されており、マルチコアCPUの性能を最大限に活用しています。.
- 処理の大部分はCPUで行われます。処理速度を向上させるための最初の鍵は、より高速なCPUです。.
- ヘキサコアおよびオクタコア、最新世代の i7 または Xeon CPU が推奨されます。クロック速度は一般的にプロジェクト全体に影響を与え、コア数はステップ 2 の ポイントクラウドとメッシュ。
- デュアルソケットCPUは性能を2倍にするわけではありませんが、一般的にシングルソケットCPUよりも高速な処理を実現します。.
- 8コアCPUを使用することで、ステップ3のパフォーマンスが向上しました。DSM 、オルソモザイク、インデックス。
役立つリンク:処理に使用するコア数を指定できます。詳細については、「 処理に割り当てられるリソース(コアとRAM)を変更する方法」を参照してください。
さまざまなCPUを比較するには、 www.cpubenchmark.net を。
- RAMの容量は、主に1つのプロジェクトで処理できる画像の数に影響します。.
- RAMの容量は、プロジェクトの規模(画像数と解像度)によって異なります。ほとんどのプロジェクトでは、32GBのRAMが推奨されます。大規模なデータセットや高解像度画像(1000枚以上の画像を含むプロジェクト、または40メガピクセル以上の画像を含むプロジェクト)を処理する場合は、最低でも32GBのRAMが推奨されます。.
- 我々の実験では、32GBのRAMは16GBのRAMよりも高速にオルソモザイク画像を生成できることが観察された。.
役立つリンク:処理に使用するRAMの量を指定できます。詳細については、「 処理に割り当てられるリソース(コアとRAM)を変更する方法」を参照してください。
- に対応したGPU OpenGL 3.2 (Intel HD 4000以降の統合グラフィックカードに相当)と互換性があります。Compute Capabilityが2.0未満のデバイスは、Pix4Dソフトウェアではサポートされていません。
- PIX4DmapperはGPUの処理能力を利用します。Nvidia CUDA 9.1以降に対応しています。 最新のドライバ(例:GeForce 1070/1080、Quadro P4000/5000、Titan X、Tesla)がインストールされている 」において、PIX4Dmapperのパフォーマンスが向上します 1 大規模プロジェクトの
- 我々の実験では、CUDA対応のグラフィックカードを使用すると、キャリブレーション処理が高速化されることが観察された。.
- では10%~75%の高速化が 1「初期処理」、ステップ 2 「点群とメッシュ」。一般的に、オーバーラップ率が高く、画像コンテンツが豊富で、キーポイント数が多いプロジェクトほど、高速化の恩恵が大きくなります。
役立つリンク: CUDA の計算能力を確認する方法の詳細については、 http://en.wikipedia.org/wiki/CUDA を。
さまざまな GPU を比較するには、 www.videocardbenchmark.net を。
- 従来のハードディスクまたはSSDによるRAID構成が推奨されます。.
- ステップ 3。DSM、オルソモザイク、インデックスは 、ハードディスクの速度に最も影響を受けます。
我々は、処理オプションに応じて、画像数、使用するハードウェア、および各ステップにかかる時間の間の相関関係を調査するための実験を行った。.
テストに使用したハードウェア
MacBook Pro 15インチ
- 4コアi7(モバイル版)i7-4870HQ(CPUスコア:9345*)
- SSD
- 16GB RAM
デスクトップi7
- 6コア i7 5820k (CPUスコア: 12995*)
- Nvidia Geforce 1050Ti (GPUスコア: 5769*)
- 24GB RAM
ワークステーション
- デュアル8コアXeon(16コア)E5-2650 v2(CPUスコア:19314*)
- Nvidia TITAN Black(GPUスコア:8561*)
- 64GB RAM
ラップトップ
- 4コアi7(モバイル版)i7-4710MQ(CPUスコア:7996*)
- Nvidia GTX 980M(GPUスコア:5706*)
- SSD
- 16GB RAM
デスクトップAMD
- 8コア Ryzen 7 1800 (CPUスコア: 15372*)
- Nvidia Geforce 1050Ti (GPUスコア: 5769*)
- 32GB RAM
※2017年11月8日のスコアに基づく
実施された実験
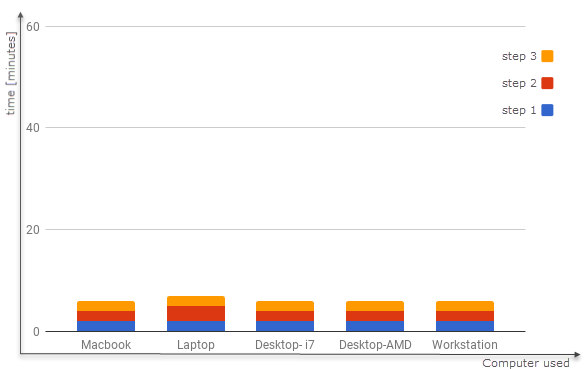
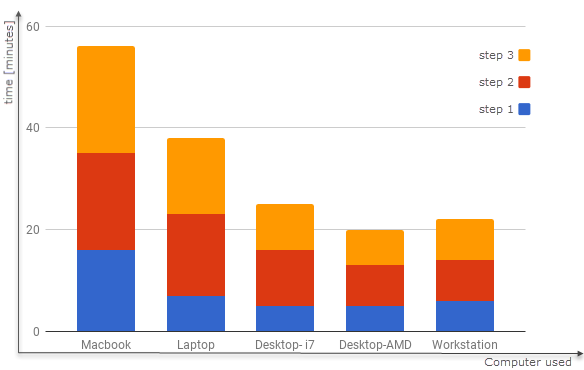
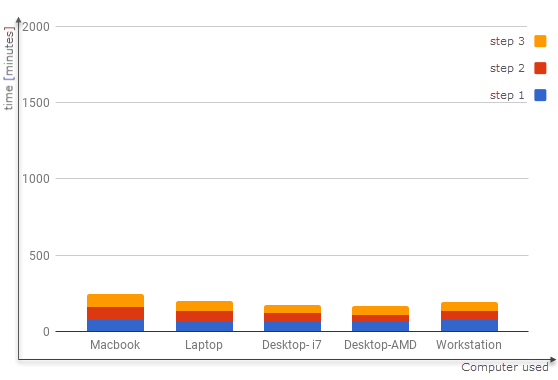
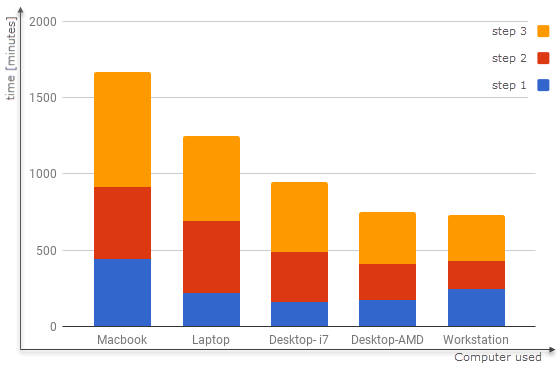
以下のグラフは、使用するハードウェアに応じて処理時間がどのように変化するかを示しています。ステップ 1:初期処理 は青色、ステップ 2:点群とメッシュは 赤色、ステップ 3:DSM、オルソモザイク、インデックスは 黄色で示されています。これらのプロジェクトは、安定版バージョン3.2.23で処理されました。
最初の実験で使用したデータセットは、小規模な天底プロジェクトであり、DJIのPhantom 4ドローンで取得した解像度3000×4000ピクセルの画像83枚で構成されています。.
2番目の実験で使用したデータセットは、MAVinciドローンで取得した4592×3448ピクセルの解像度を持つ1248枚の画像からなる大規模な天底プロジェクトです。.
結論:
- 高性能デスクトップコンピュータは、ノートパソコンよりも2倍速く処理した。.
- CUDA対応グラフィックカードを使用することで、キャリブレーション処理が2倍高速化された。.
- デュアルソケットマシンは、大規模プロジェクトにおいて3分の1の速さで作業できた。.
- 処理オプションの影響は、最大で5~10倍の乗数効果となる可能性があります。.
- HDD/SSDの性能による影響は小さい。.
- 3Dマップ - 高速/低解像度テンプレートを使用した場合の処理時間は、ハードウェアにほぼ依存しません(CPUやGPUよりも入出力によって制限されます)。.
- 大規模プロジェクトの処理には、小規模プロジェクトの約10倍の時間がかかります。.
免責事項:Pix4Dはこの情報を顧客への便宜として公開しています。この情報は正確ではない可能性があるため、Pix4Dはその正確性に関して、明示的または黙示的を問わず、いかなる保証も行いません。.