PIX4Dcloudは、プロジェクトの概要を把握し、その精度と品質を評価するために使用できる品質レポートを生成します。.
- に移動してください 「ファイルとレポート」>「結果」 ダウンロード可能なアイテムの一覧を表示するには、
- をクリックしてください 「ダウンロード」 品質レポートの
この記事では
較正された画像の数、つまり、モデルの再構築に使用された画像の数。.
- 緑色で強調表示されているテキスト:画像の95%以上がキャリブレーション済みです。
- オレンジ色で強調表示されているテキスト:画像の65%から95%がキャリブレーションされています。
- 赤字で強調表示されている部分:画像の65%未満しかキャリブレーションされていません。
パースペクティブレンズ:初期焦点距離と最適化された焦点距離の差をパーセンテージで表したもの。.
- 緑色で強調表示されたテキスト:
- 透視レンズ:初期焦点距離と最適化された焦点距離の差が1%未満である。.
- オレンジ色で強調表示されたテキスト:
- パースペクティブレンズ:初期焦点距離と最適化された焦点距離の差の割合は1%から5%の間です。.
- 赤色で強調表示されたテキスト:
- パースペクティブレンズ: 初期焦点距離と最適化された焦点距離の差の割合が 5% 以上です。処理失敗レポート: 情報が利用できないため、常に表示されます。.
較正済み画像あたりのマッチング数の中央値。.
- 緑色で強調表示されたテキスト:
- 較正済み画像1枚あたり、1,000件以上のマッチングが計算されています。.
- オレンジ色で強調表示されたテキスト:
- 較正済みの画像1枚あたり、100~1,000件の一致が算出されている。.
- 赤色で強調表示されたテキスト:
- 較正済み画像1枚あたり、100件未満のマッチング結果が算出されています。.
画像ごとのキーポイント数の中央値。キーポイントとは、画像内で検出可能な特徴的な点のことです。.
- 緑色で強調表示されたテキスト:
- 画像1枚あたり1万点以上のキーポイントが抽出されています。.
- オレンジ色で強調表示されたテキスト:
- 画像1枚あたり、500個から10,000個のキーポイントが抽出されています。.
- 赤色で強調表示されたテキスト:
- 画像1枚あたり、抽出されたキーポイントは500個未満です。.
誤差 [px]
誤差 [px]

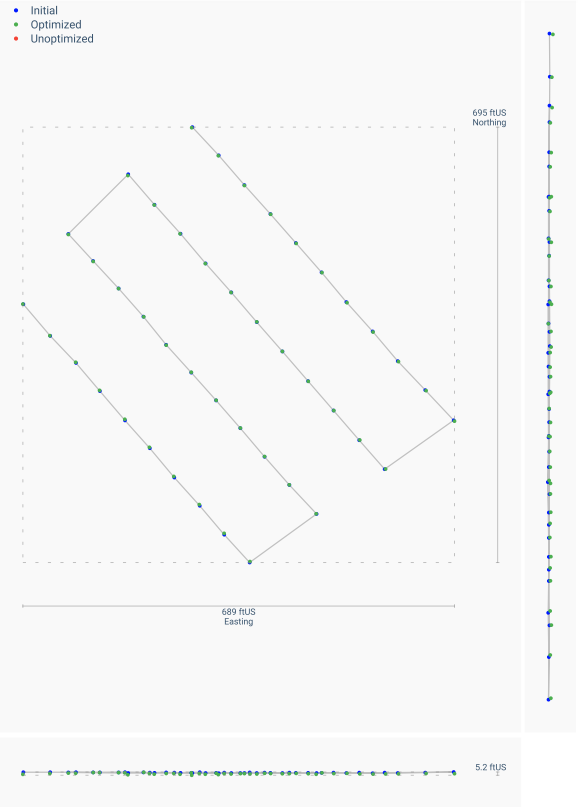
青色 - 画像のEXIF情報から抽出されたカメラの初期位置を示します。
緑色 - キャリブレーション手順が完了した後のカメラの計算された位置を示します。
赤色 - カメラ位置が未校正です(校正に失敗しました)。
この線は、カメラが連続する各画像間を移動した最短経路を表しています。.
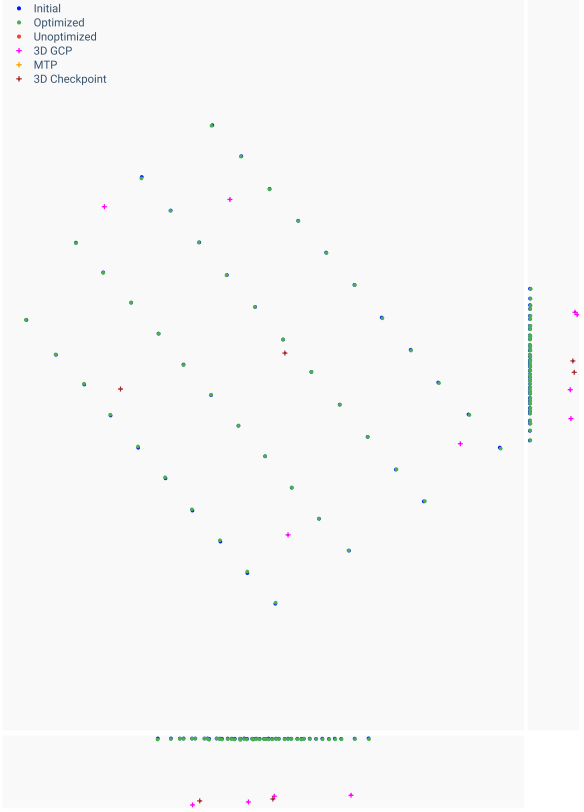
青色 - 画像のEXIF情報から抽出されたカメラの初期位置を示します。
緑色 - キャリブレーション手順が完了した後のカメラの計算された位置を示します。
赤色 - カメラ位置が未校正です(校正に失敗しました)。
紫色 - GCP(地上基準点)の 最適化された 位置。
ブラウン - 3Dチェックポイントの 最適化された 位置。
この線は、各画像の初期位置と最適化された位置の関係を表しています。.
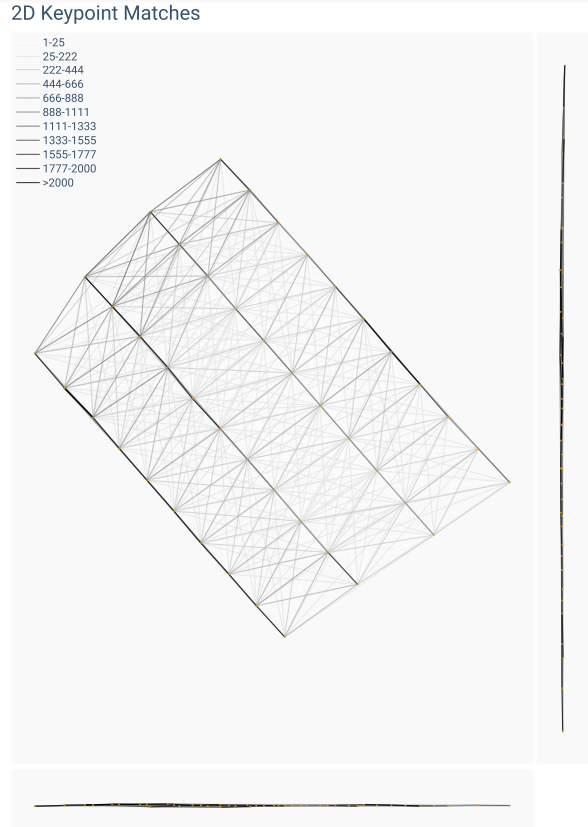
リンクの太さは、各画像ペア間で一致する2Dキーポイントの数を示しています。リンクの色が薄いほど一致する点が少なく、色が濃いほど一致する点が多いことを意味します。.

最小誤差 と 最大誤差は 、プロジェクトの測定単位における-1000から1000までの範囲の地理位置情報誤差を表します。
位置情報誤差X、Y、Zは、 あらかじめ定義された誤差範囲内で位置情報誤差を含む画像の割合を示します。位置情報誤差とは、初期画像位置と最適化された画像位置の差です。なお、画像の位置情報誤差は、再構成の精度とは直接関係ありません。
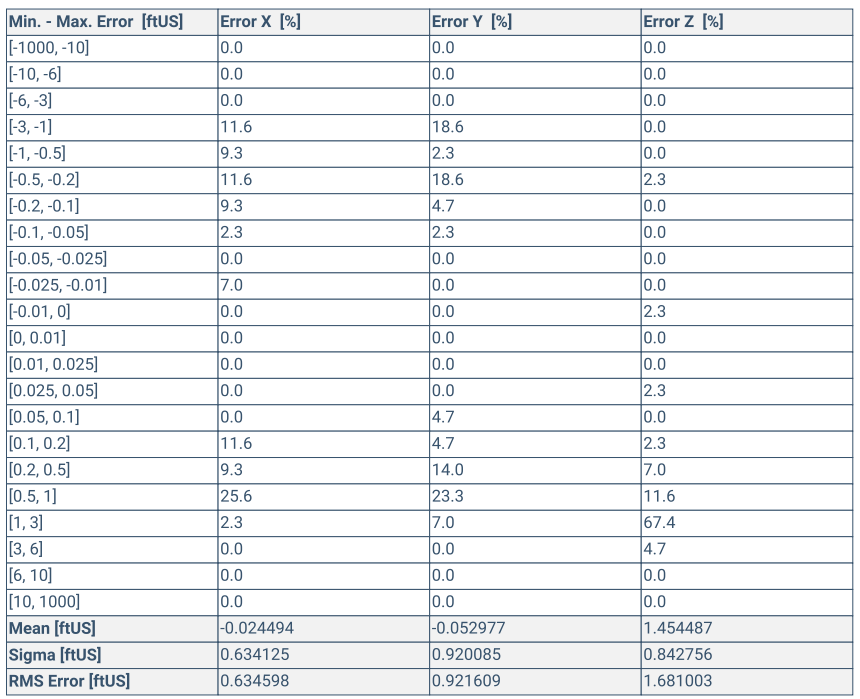
最小誤差[プロジェクト単位] / 最大誤差[プロジェクト単位]
定義済みの誤差範囲内で、X方向の位置情報に誤差がある画像の割合。位置情報の誤差とは、カメラの初期位置情報と計算された位置情報との差のことです。.
画像方向の二乗平均平方根誤差。これは、初期画像方向と最適化された画像方向の差です。画像方向の誤差は、再構成の精度とは直接関係がないことに注意してください。.
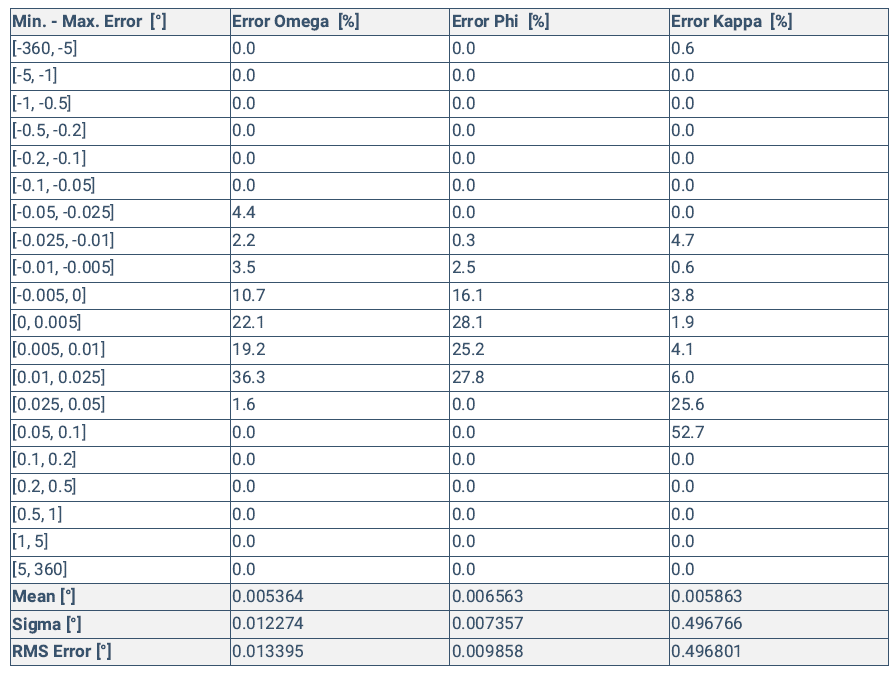
最小誤差[度] / 最大誤差[度]
データセット内の画像のうち、定義された角度範囲内の方向誤差を持つ画像の割合。.