- 品質レポートの分析方法の詳細については、 品質レポートヘルプを参照し。
- 品質レポートの分析方法の説明については、 ステップ 4. 処理を。
品質レポートは、処理の各ステップ終了後に自動的に表示されます。自動表示を停止するには、 「処理後に自動表示する」チェック 品質レポート下部の
ステップ 1. 初期処理 、処理が失敗しました。
ステップ 1. 初期処理 が完了した後:
- まとめ
- 品質チェック
- プレビュー
- 校正の詳細
- 初期画像位置
- コンピュータ画像/GCP/手動タイポイントの位置
- カメラの絶対位置と向きの不確実性
- 重複
- バンドルブロック調整の詳細
- 透視レンズ用内部カメラパラメータ
- 魚眼レンズ用カメラ内部パラメータ
- 内部カメラパラメータの相関関係
- 2Dキーポイント表
- カメラ用2Dキーポイントテーブル
- カメラモデル間の一致数の中央値 / 75% / 最大値
- 2Dキーポイントマッチングからの3Dポイント
- 2Dキーポイントマッチ
- カメラの相対位置と向きの不確実性
- 手動タイポイント
- 地上管制ポイント
- 規模の制約
- 方向制約
- 絶対位置偏差
- 位置情報バイアス
- 画像方向の差異
- 地理位置情報座標系の変換
- 相対的な地理的位置のばらつき
- ローリングシャッターの統計
- 初期処理の詳細
ステップ 2「点群とメッシュ」 が完了した後:
ステップ3. DSM、オルソモザイク、インデックスが完了した後:
| 処理に失敗しました | |
|---|---|
| エラー: | 処理が失敗した原因となったエラーの説明。. |
| サブステップ: | のサブステップの 初期処理 うち、処理が失敗した段階。 |
| 原因: | 故障の考えられる原因の説明。. |
| 解決策: | 考えられる解決策の説明と、手順を追った説明へのリンク。. |
| まとめ | |
|---|---|
| プロジェクト: | プロジェクト名。. |
| 処理済み: | 処理日時. |
| カメラの機種名 | 画像の撮影に使用されたカメラの機種名。. |
| リグ名 | 画像の撮影に使用されたリグの名前。リグが検出された場合、そのリグに搭載されているすべてのカメラが上記の「カメラモデル名」に表示されます。. |
| 平均地上サンプリング距離(GSD): | 初期画像の平均GSD。GSDの詳細については、 地上サンプリング距離(GSD)。 |
| 対象地域: | プロジェクトが対象とする2次元領域。より小さな 処理領域 が描画されている場合でも、この領域は影響を受けません。 |
| 初期処理にかかる時間(レポートなし): | にかかる時間 初期処理 品質レポートの作成に必要な時間を除いた、 |
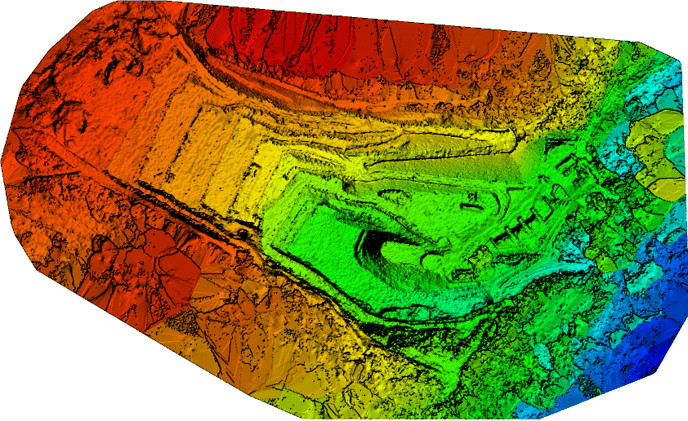
| プレビュー | ||
 |
 |
|
| 図1:高密度化処理前のオルソモザイク画像と、それに対応する疎なデジタル表面モデル(DSM)。. | ||
| 校正の詳細 | |
| 校正済み画像の数: | 較正済みの画像数、つまり再構成に使用された画像数を、プロジェクト内の画像総数(有効な画像と無効な画像を含む)で割った値。 |
| 位置情報付き画像の数: | 位置情報が付与されている画像の数。. |
| 初期画像位置 |
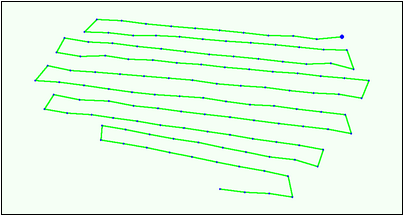 |
| 図2:初期画像位置の上面図。緑色の線は、大きな青色の点から始まる、時間の経過に伴う画像の位置を示しています。. |
| コンピュータ画像/GCP/手動タイポイントの位置 |
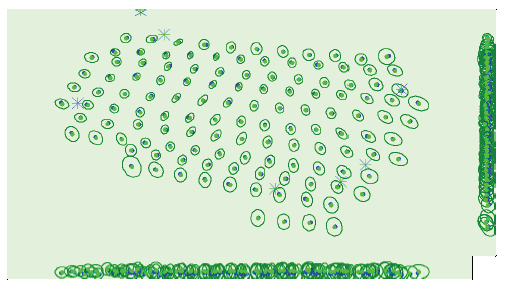 |
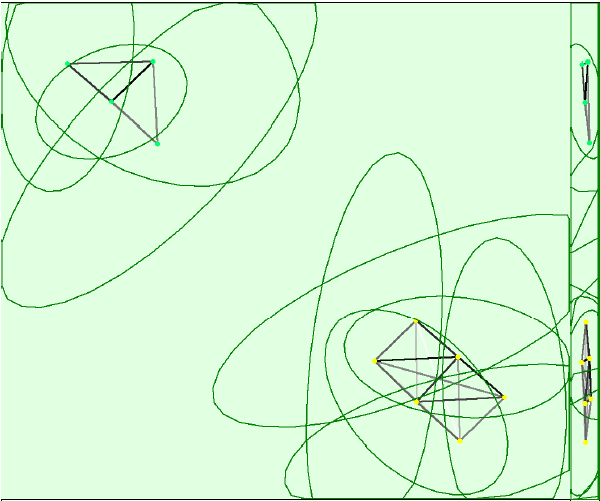
| 図3:初期画像位置(青い点)と計算画像位置(緑の点)のオフセット、およびGCPの初期位置(青い十字)と計算位置(緑の十字)のオフセットを、上面図(XY平面)、正面図(XZ平面)、側面図(YZ平面)で示しています。濃い緑色の楕円は、バンドルブロック調整結果の絶対位置の不確実性(Nx倍)を示しています。. |
| カメラの絶対位置と向きの不確実性 | ||
 |
||
| 平均X/Y/Z: | カメラの絶対位置におけるX/Y/Z方向の平均不確実性。. | |
| 平均オメガ/ファイ/カッパ: | 絶対カメラ位置のオメガ/ファイ/カッパ方向角における平均不確実性。. | |
| カメラの平均変位X/Y/Z: | リニアローリングシャッターで処理されたプロジェクトでのみ利用可能です。カメラの絶対位置における、X/Y/Z方向のカメラ変位の平均不確実性。. | |
| シグマX/Y/Z: | カメラの絶対位置のX/Y/Z方向における不確実性の標準偏差(シグマ)。. | |
| シグマ・オメガ/ファイ/カッパ: | 絶対カメラ位置のオメガ/ファイ/カッパ角における不確実性のシグマ。. | |
| シグマカメラのX/Y/Z方向の変位: | リニアローリングシャッターで処理されたプロジェクトでのみ利用可能です。カメラの絶対位置のX/Y/Z方向におけるカメラ変位の不確実性の標準偏差(シグマ)。. | |
| 重複 |
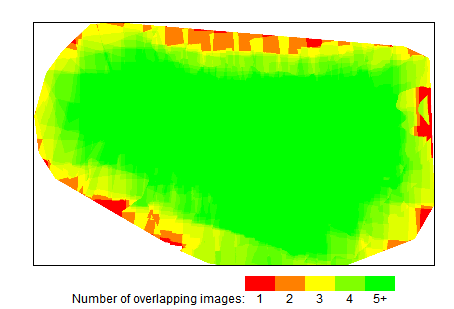 |
| 図4:オルソモザイクの各ピクセルについて計算された重複画像の数。赤と黄色の領域は重複が少ないことを示し、結果が悪くなる可能性があります。緑の領域は、各ピクセルで5枚以上の画像が重複していることを示します。これらの領域でもキーポイントの一致数が十分であれば、高品質の結果が生成されます(キーポイントの一致については図5を参照)。. |
| バンドルブロック調整の詳細 | |
| バンドルブロック調整のための2Dキーポイント観測数: | AAT/BBAに使用されるすべての画像における自動タイポイントの数。これは、少なくとも2つの画像で一致させることができたすべてのキーポイント(特徴点)の数に相当します。. |
| バンドルブロック調整のための3Dポイント数: | 画像上の2D点をマッチングさせることで生成された、すべての3D点の数。. |
| 平均再投影誤差[ピクセル]: | ピクセル単位で表した再投影誤差の平均値。.
計算された各3Dポイントは、最初に画像上で検出されます(2Dキーポイント)。各画像において、検出された2Dキーポイントは特定の位置を持ちます。計算された3Dポイントが画像に投影されると、再投影された位置を持ちます。初期位置と再投影された位置の間の距離が再投影誤差となります。詳細については、「 再投影誤差」を。 |


| 内部カメラパラメータの相関関係 |
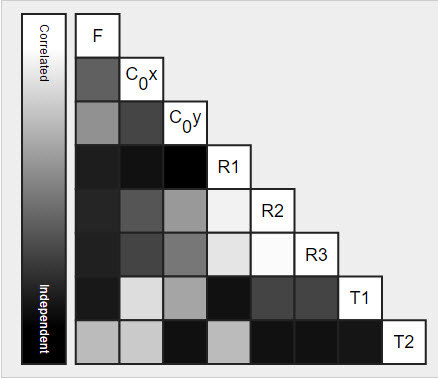 |
| バンドル調整によって決定されるカメラ内部パラメータ間の相関関係。相関行列は、内部パラメータが互いにどの程度補償し 合っているかを示します。白はパラメータ間に完全な相関関係があることを示し、つまり、一方のパラメータの変化は他方のパラメータによって完全に補償されます。黒は、そのパラメータが完全に独立しており、他のパラメータの影響を受けないことを示します。 |


| カメラモデル間の一致数の中央値 / 75% / 最大値 | |
 |
|
| 中央値 / 75パーセンタイル / 最大値: | 2つのカメラモデル間のマッチング数の中央値、75パーセンタイル(上位四分位数)、最大値。セルが空の場合は、対応するカメラ間でマッチングが計算されていないことを示します。. |
| 2Dキーポイントマッチングからの3Dポイント | |
|---|---|
 |
|
| N枚の画像で観測された3Dポイントの数: |
各3Dポイントは、少なくとも2枚の画像で観測されたキーポイントから生成されます。この表の各行は、N枚の画像で観測された3Dポイントの数を示しています。3Dポイントが視認できる画像番号が大きいほど、その精度が高くなります。. |
| 2Dキーポイントマッチ |
 |
|
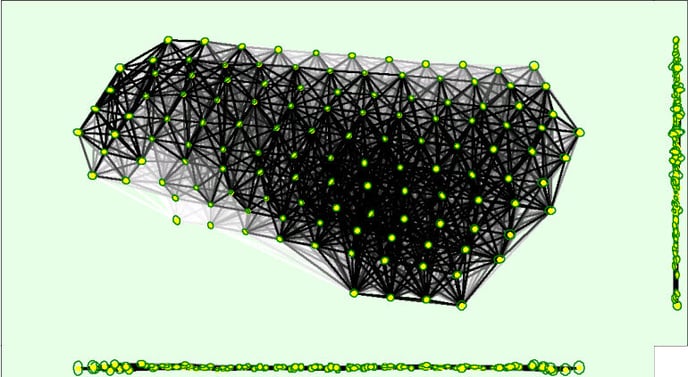
図5:一致する画像間のリンクを含む、画像計算位置の上面図。リンクの濃さは、画像間で一致する2Dキーポイントの数を示します。明るいリンクはリンクが弱いことを示し、手動タイポイントまたは追加の画像が必要です。濃い緑色の楕円は、バンドルブロック調整結果の相対的なカメラ位置の不確実性(Nx拡大)を示します。. 2Dキーポイントマッチグラフでは、各ブロックが異なる色(以下の例では緑と黄色)で表示されます。 |
 |

| 手動タイポイント |
|
|---|---|
 |
|
| MTP名: | 手動タイポイントの名称。. |
| 投影誤差[ピクセル]: | 手動タイポイントがマークされ、再投影された画像における平均距離。. |
| 検証済み/マーク済み: | 検証済み:手動タイポイントがマークされ、再構築に考慮された画像の数。 マーク済み:手動タイポイントがマークされた画像。 |
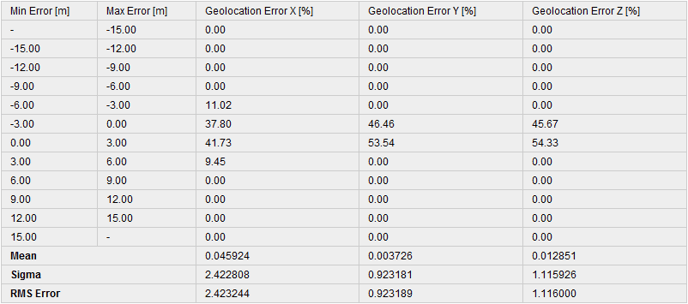
| 地上管制ポイント |
|
|---|---|
 |
|
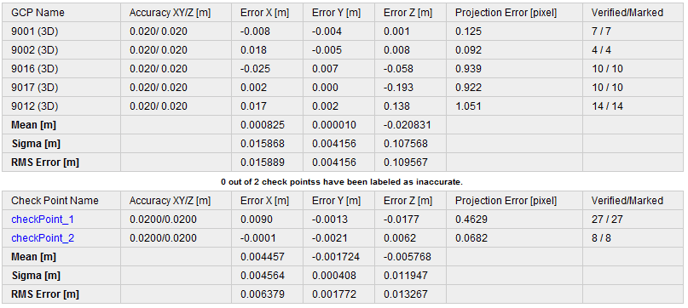
| GCP名: | GCP の名前と GCP タイプ。タイプは以下のいずれかです。
|
| チェックポイント名: | チェックポイントの名前。. |
| 精度 XY / Z [m]:
精度 XY / Z [フィート]: |
ユーザーが指定したGCP/チェックポイントのXY方向の精度、およびユーザーが指定したGCP/チェックポイントのZ方向の精度。 精度は、GCP/チェックポイントの各方向における精度を示します。 |
|
エラー X [m]: エラー X [ft]: |
計算されたGCP/チェックポイントの3Dポイントと元の位置とのX方向における差(元の位置 - 計算された位置)。. |
|
エラー Y [m]: エラー Y [ft]: |
計算されたGCP/チェックポイントの3Dポイントと元の位置とのY方向の差(元の位置 - 計算された位置)。. |
|
エラー Z [m]: エラー Z [ft]: |
計算されたGCP/チェックポイントの3DポイントとZ方向の元の位置との差(元の位置 - 計算された位置)。. |
| 投影誤差[ピクセル]: | GCP/チェックポイントがマークされている画像と、それが再投影された画像における平均距離。. |
| 検証済み/マーク済み: | 検証済み:GCP/チェックポイントがマークされ、再構築に考慮される画像の数。 マーク済み:GCP/チェックポイントがマークされている画像。 |
|
平均値 [m]: 平均 [フィート]: |
各方向(X、Y、Z)における平均誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
|
シグマ[m]: シグマ[ft]: |
各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
|
RMS誤差[m]: RMS誤差 [フィート] |
各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |



| 画像方向の差異 | |
|---|---|
 |
|
| 位置情報の向きのばらつき: | 画像方位角の二乗平均平方根(RMS)誤差。初期画像方位角と計算された方位角の差。. |
| オメガ: | オメガ角(度)におけるRMS誤差。. |
| ファイ: | ファイ角(度)のRMS誤差。. |
| カッパ: | カッパ角のRMS誤差(度)。. |


| ローリングシャッターの統計 | |
|---|---|
 |
|
| 図6:ローリングシャッターカメラモデルによって推定されたカメラの動き。緑色の線は計算された画像位置を示しています。青色の点は露光開始時のカメラ位置を表しています。青色の線はローリングシャッター読み出し中のカメラの動きを表しており、視認性を高めるためにプロジェクト固有のスケーリング係数で再スケーリングされています。. | |
|
|
|
| カメラの平均速度: | 画像撮影時のドローンの平均速度。. |
| ローリングシャッターの変位の中央値(センサー読み取り時): | 画像撮影時(読み出し時)におけるカメラのローリングシャッター変位の中央値。. |
| シャッターの開閉時間の中央値: | 画像撮影にかかる時間の中央値。. |

初期処理の詳細
| システム情報 | ||
|---|---|---|
 |
||
| ハードウェア: | 処理に必要なCPU、RAM、GPU。. | |
| オペレーティング·システム: | 処理に使用されるオペレーティングシステム。. | |
| 座標系 | ||
|---|---|---|
 |
||
| 画像座標系 | 画像の位置情報を示す座標系。. | |
| 地上基準点(GCP)座標系 | GCP(地上基準点)を使用する場合は、その座標系を指定します。. | |
| 出力座標系 | プロジェクトの出力座標系 | |
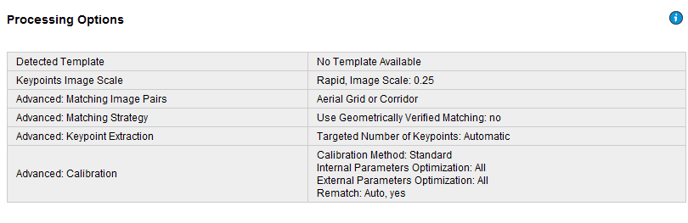
| 処理オプション | ||
|---|---|---|
 |
||
| 検出されたテンプレート: | 処理オプションテンプレート(テンプレートが使用されている場合)。 | |
| 要点画像スケール: | キーポイントを計算する際の画像スケール。スケールは3つの異なる方法で選択できます。
以下の画像スケールを選択できます。
|
|
| 高度な機能:画像ペアのマッチング: | マッチングする画像ペアを選択する方法を定義します。選択方法は3種類あります。
|
|
| 上級編:マッチング戦略: | 画像は、 幾何学的に検証されたマッチングを。 | |
| 高度な機能:キーポイント抽出: | 抽出するキーポイントの目標数。目標数は以下のとおりです。
|
|
| 詳細設定:キャリブレーション: | 使用した校正パラメータ:
|
|
| 高度な機能:自動スカイマスキング | Bebod 2プロジェクトでのみ利用可能です。. | |
| リグ処理 |
掘削リグプロジェクトのみで利用可能です。. |
|
点群密度の詳細
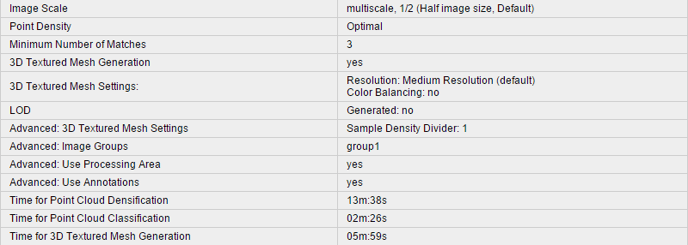
| 処理オプション | |
|---|---|
 |
|
| 画像スケール: |
点群密度化に使用される画像スケール:
かどうかも表示されます マルチスケール 。 |
| 点密度: | 高密度化された点群の点密度。以下のいずれかの値をとることができます。
|
| 最低試合数: | 3Dポイントごとの最小一致数は、その3Dポイントを画像上に有効に再投影できる最小数を表します。値は2~6です。. |
| 3Dテクスチャメッシュ生成: | 3Dテクスチャメッシュが生成されたかどうかを表示します。. |
| 3Dテクスチャメッシュ設定: |
3Dテクスチャメッシュ生成の処理設定を表示します。. 解像度: 3Dテクスチャメッシュ生成に使用する解像度を選択します。以下のいずれかを選択できます。
カラーバランス調整:3Dテクスチャメッシュのテクスチャ生成にカラーバランス調整アルゴリズムを選択した場合に表示されます。 |
| LOD |
生成済み: はいまたはいいえのいずれかです。 |
| 詳細設定:3Dテクスチャメッシュ設定: |
サンプル密度分割器:1~5の範囲で設定できます。 |
| 詳細設定:ウィンドウサイズのマッチング: | 元の画像内の高密度化された点に合わせるために使用されるグリッドのサイズ。. |
| 詳細設定:画像グループ: | 高密度点群が生成された画像グループ。画像グループごとに1つの高密度点群が生成されます。. |
| 詳細設定: 処理領域の使用: | を表示します 処理領域 が考慮されているかどうか |
| 上級編:注釈の使用: | ステップ 2 の処理オプションで選択したように、注釈を考慮するかどうか。 ポイント クラウドとメッシュ。 |
| 詳細設定:カメラの深度を自動的に制限する: | カメラの深度が自動的に制限されているかどうかを表示します。. |
| 点群密度化のタイミング: | 高密度点群を生成するのに要した時間。. |
| 点群分類の時間: | 分類済み点群を生成するのに要した時間。. |
| 3Dテクスチャメッシュ生成の時間です。 | 3Dテクスチャメッシュの生成にかかった時間。3D 「NA」と テクスチャメッシュが生成されていない場合は |
| 結果 | |
|---|---|
 |
|
| 処理されたクラスター数: | 複数のクラスターが生成されている場合は、生成されたクラスターの数を表示します。. |
| 生成されたタイルの数: | 高密度化された点群に対して生成されたタイルの数を表示します。. |
| 3D高密度化点の数: | このプロジェクトで取得された3D高密度化点の総数。. |
| 平均密度(1立方メートルあたり): | プロジェクトで得られた1立方メートルあたりの3D高密度化点の平均数。. |
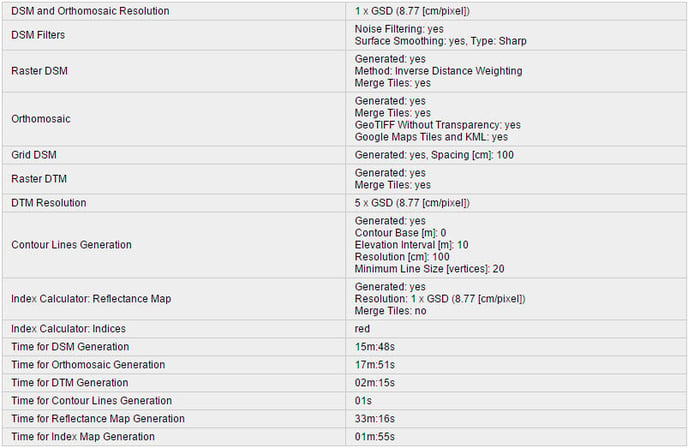
DSM、オルソモザイク、インデックスの詳細
| 処理オプション | |
|---|---|
 |
|
| DSMとオルソモザイク解像度: | DSMおよびオルソモザイクの生成に使用された解像度。ステップ 1「初期処理」 使用される場合は、その値が表示されます。 |
| DSMフィルター: |
どうかを表示します ノイズフィルタリング 両方が使用されているか 表面平滑化の。 表面平滑化 が使用されている場合は、その種類も表示されます。種類は次のとおりです。
|
| ラスターDSM: |
DSMが生成された場合に表示します。DSM 方法 の生成に使用された
DSMタイルが1つのファイルに統合されているかどうかを表示します。. |
| オルソモザイク: |
オルソモザイクが生成されているかどうかを表示します。オルソモザイクタイルが1つのファイルにマージされているかどうかを表示します。 透明度なしのGeoTIFF 、 Googleマップタイル、およびKML が生成されているかどうかを表示します。 |
| グリッドDSM: | グリッドDSMが生成されたかどうかを表示します。 グリッド 間隔 使用された |
| ラスターDTM: | DTMが生成された場合に表示されます。 タイル がマージされた場合に表示されます。 |
| DTM解像度: | DTMの生成に使用された解像度を表示します。. |
| 等高線生成: |
等高線が生成されたかどうかを表示します。使用された以下のパラメータの値を表示します。
|
| インデックス計算機:放射測定校正: | 放射測定校正が使用された場合に表示されます。. |
| インデックス計算機:反射率マップ: | 場合に表示されます 反射率マップ が生成された 解像度 と、反射率マップタイルが1つのファイルにマージされたかどうかも表示されます。 |
| 指数計算機:指数: | 場合は表示されます インデックス のリストを表示します インデックス。 |
| 指数計算機:指数値: | 場合に表示されます インデックス エクスポートされた ポイントシェープファイルグリッドサイズ または ポリゴンシェープファイル。生成された出力のグリッドサイズを表示します。 |
| DSM世代の到来: | DSMの作成に要した時間。. |
| オルソモザイク生成の時期: | オルソモザイク画像の生成に要した時間。. |
| DTM生成のタイミング: | DTMの生成に要した時間。. |
| 等高線生成の時間です。 | 等高線を生成するのに要した時間。. |
| 反射率マップ生成にかかる時間: | 反射率マップの生成に要した時間。. |
| インデックスマップ生成の時間: | インデックスマップの生成にかかった時間。. |
| カメラの放射補正 | |
|---|---|
| カメラ名: | カメラの名前を表示します。. |
| バンド: | 放射補正が適用されたカメラのバンドを表示します。. |
| 放射測定補正タイプ: | バンドの画像に適用された放射補正の種類を表示します: カメラのみ、 カメラと太陽放射照度、または カメラ、太陽放射照度、太陽角度。 |