この手法では、カメラは動かず固定されており、被写体は視覚的な目印が付いたターンテーブル上で回転する。.
準備
-
PIX4Dのビジュアルマーカーは こちら。
-
PIX4Dの視覚マーカーは、光沢のない紙に印刷してください。マーカーを囲む円の直径は約30cmにしてください。.
-
印刷した紙でターンテーブルを包む。.
-
ターンテーブルの後ろに白い柔らかい厚紙のロールを置いて、背景を隠してください。.
-
撮影中にカメラが安定するように、三脚にカメラを取り付けてください。.
- 処理中に最適化する必要のあるパラメータを最小限に抑えるため、焦点距離が固定されたレンズを使用することをお勧めします。.
- 絞り値をf25付近に設定することで、より深い被写界深度を実現できます。.
- 被写体の質感を最大限に引き出し、反射を抑えるためには、拡散光を用いた光源でシーンを照らすことをお勧めします。.
画像取得
-
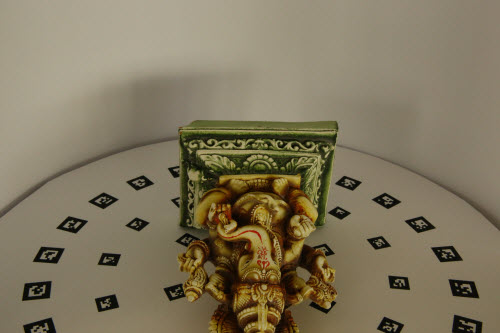
ターンテーブルの中央にある小さな矢印がカメラから離れる方向を指すようにターンテーブルを回転させてください(下図参照)。

補足: この矢印はローカル座標系のy軸の方向を示しており、モデルをビューアの方を向くように再構築することができます。 - 対象物をターンテーブルの上に置いてください。.
- 最初の画像を撮影してください。.

- ターンテーブルを約15度回転させて写真を撮ってください。外側のリングの次の目盛りがカメラの正面に来るようにしてください。.
- 対象物が1回転するまで、手順4を繰り返してください。.
- させて 対象物を回転、再びターンテーブルの上に置いてください。
- 手順1~6を繰り返して、別の視点から2つ目のデータセットを取得し、対象物を完全に再現します。対象物を完全に捉えるために必要な数のデータセットを取得してください。.
画像処理
- PIX4Dtaggerを使用して.p4dプロジェクトファイルを生成する
- PIX4Dmapperを使用してサブプロジェクトを処理する
- (オプション)PIX4Dmapperを使用してサブプロジェクトをマージする
PIX4Dtaggerを使用して.p4dプロジェクトファイルを生成する
-
開きます PIX4Dtagger を。PIX4Dtagger は、バージョン 2.2 から 4.5.6 までの PIX4Dmapper に付属してインストールされています。PIX4Dmapper 4.5.6 のインストールファイルは、 こちらから。実行ファイルは、PIX4Dmapper の実行ファイル (PIX4Dmapper.exe) と同じフォルダにあります。したがって、その場所は PIX4Dmapper のインストール場所によって異なります。たとえば、C:\Program Files\Pix4Dmapper のようになります。
- で 画像ディレクトリ、 「参照...」 、画像が保存されているディレクトリを選択します。PIX4Dtagger は 一度に1つのサブプロジェクトにのみ使用してください。
- で 「タグ座標ファイル」、 「参照...」 、プロジェクトで使用されたタグとその角が保存されている *.csv ファイルを選択します。ファイルは ここ。
重要: ビジュアルマーカーの座標は、大きなマーカーが 1.6 x 1.6 cm、小さなマーカーが 1.2 x 1.2 cm のターンテーブル用に計算されています。印刷されたマーカーの寸法が異なる場合、オブジェクトは実際のスケールなしでモデル化されます。その場合は、ステップ 1 の処理後にスケール制約を追加できます: プロジェクトのスケール方法 - で カメラモデルファイル、 [参照...] 、C:\Users\Your Username\AppData\Local\pix4d\commonにあるカメラデータベースを選択します。
重要: カメラがPix4Dカメラデータベースに含まれていない場合は、プロジェクト作成時に保存する必要があります。 メニュー [プロジェクト] > [イメージプロパティエディター...] > [選択したカメラモデル] > [カメラモデルの編集] - で 「出力ファイル」をクリックし 「参照...」 、出力ファイルの名前と保存場所を選択します。
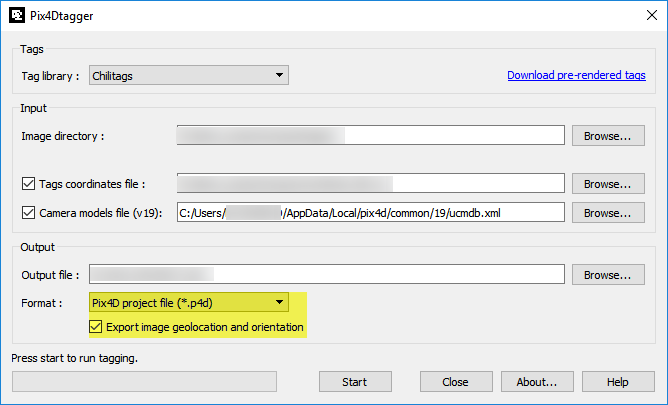
- で 「フォーマット」「Pix4Dプロジェクトファイル(*.p4d)」を選択し、 「画像の位置情報と向きをエクスポート」 が選択されていることを確認してください。PIX4Dtaggerは、タグの座標に基づいて外部の向きを計算できます。これらの外部の向きは、標準のPix4D処理中に初期値として使用され、再構築に役立ちます。
- をクリックして 開始」 、プロジェクトファイルの書き出しを開始します。
- 取得したデータセットごとに、手順1~7を繰り返してください。.
- をクリックしてください 「閉じる」 。
PIX4Dmapperを使用してサブプロジェクトを処理する
-
PIX4Dmapperで生成された各サブプロジェクトをダブルクリックして開きます。.
-
の処理オプションで 1. 初期処理、 [マッチング画像ペア] の [マッチング] 、 [フリーフライト] または [地上]。 メニュー [処理] > [処理オプション...] > [1. 初期処理] > [マッチング]。
-
で 処理オプション ステップ 1. 初期処理、 [キャリブレーション] タブで、 [正確な位置情報と方位の キャリブレーション方法] を選択します: メニュー [処理] > [処理オプション...] > [1. 初期処理] > [キャリブレーション]。
-
で 画像プロパティエディタ 、 Accuracy Horz と Accuracy Vertの 値を0.10 mに編集します。詳細については、 [プロジェクト]メニュー > [画像プロパティエディタ...] > [画像テーブル]を参照。
-
処理手順 1. 初期処理。
- 生成された各サブプロジェクトに対して、手順1~5を繰り返します。.
情報: デフォルトの 水平精度 と 垂直精度の 値はそれぞれ5メートルと10メートルですが、対象物のサイズがわずか数センチメートルであるこのアプリケーションでは、これらの値は意味を成しません。
PIX4Dmapperを使用してサブプロジェクトをマージする
注: これは、複数のサブプロジェクトがキャプチャされた場合に適用されます。サブプロジェクトが 1 つだけキャプチャされた場合は、ステップ 2 に進んで、ポイント クラウドとメッシュ を作成し、ポイント クラウドと 3D テクスチャ メッシュを生成します。
-
をクリックして、画像の位置情報をクリアします 「クリア」 で 「画像 の 画像プロパティエディタ。 メニュー「プロジェクト」>「画像プロパティエディタ...」>「画像位置情報」。
-
サブプロジェクトから視覚マーカーのすべての GCP を削除します: GCP / 手動タイポイントテーブル。
-
サブプロジェクト間の共通領域に、少なくとも3つの手動接続ポイント(MTP)を設定してください。共通のMTPは、出現するすべてのサブプロジェクトで同じ名前を使用する必要があります。.
重要: サブプロジェクトが2つ以上ある場合、すべてのサブプロジェクトが同じ共通エリアを共有する必要はありませんが、各サブプロジェクトは隣接するサブプロジェクトと共通エリアと少なくとも3つのMTPを共有する必要があります。 - すべてのサブプロジェクトについて、手順1~3を繰り返してください。.
- 以下のサブプロジェクトをマージします:プロジェクトのマージ。
- プロセス手順 点群とメッシュ 統合プロジェクトの
- (オプション)以下の手順に従って、再構築された視覚的マークの点を削除するように点群を編集します。rayCloud で点群を編集する方法。
- (オプション)3Dテクスチャメッシュを視覚的なマークなしで再生成するには、次の手順に従ってください: 3Dテクスチャメッシュの生成方法 (セクション:処理後ステップ 2. ポイントクラウドとメッシュ)。
