これらのプロジェクトはどれでも無料でダウンロードできます*。実際のデータセットを使って、Pix4Dのデスクトップ機能を体験してみてください。.
実際のデータを使用することで、Pix4Dソフトウェアの機能を理解でき、独自のデータを収集する際に何が必要かを把握するのに役立ちます。.
どこから始めたらいいか分からない?各データセットの下にある手順に従って、最初のプロジェクトを作成してみましょう。.
この記事では
PIX4Dmapper のサンプルプロジェクト、
PIX4Dmatic のサンプルプロジェクト、
PIX4Dfields のサンプルプロジェクト、
PIX4Dreact のサンプルプロジェクト、
Open Photogrammetry Format (OPF) のサンプルプロジェクト
をご覧ください コミュニティ殿堂
 PIX4Dmapperのサンプルプロジェクト
PIX4Dmapperのサンプルプロジェクト
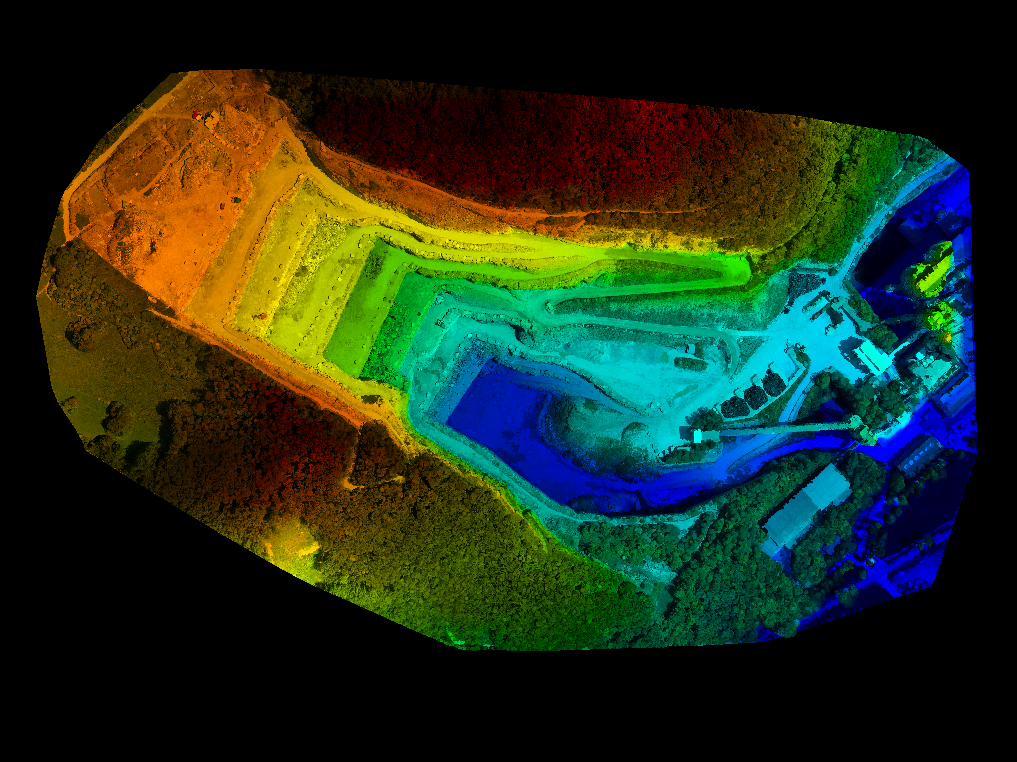
採石場
データセットをダウンロードする か、 PIX4Dcloudで表示してください。
| このプロジェクトの目標は、SenseFly SODAを搭載したeBeeドローンを使用して、採石場のDSMとオルソモザイクを生成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 5.40 cm / 2.13 インチ |
| 対象地域 | 0.5776 km2 / 57.7565 ha / 0.223 sq. mi. / 142.79 acres |
| 出力座標系 | CH1903 / LV03 ベッセル基準1841からのジオイド高。楕円体 = 0メートル |
| 画像取得 | |
| 無人航空機 | eBee Classic (senseFly) |
| 画像取得計画 | 1フライト、ダブルグリッド飛行計画 |
| カメラ | センスフライソーダ. |
| 画像 | |
| 画像数 | 347 |
| 画像サイズ | 5472x3648 |
| 画像の位置情報座標系 | WGS84 |
| GCP | |
| GCPの数 | 9つの3D GCP |
| GCP座標系 | CH1903 / LV03 |
| プロジェクトファイルをダウンロードする |
|---|
|
ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、採石場のDSM(デジタル標高モデル)とオルソモザイクを生成するために、データセットを処理する方法について説明します。. 1. プロジェクト example_quarry_2.p4dを。 注: このプロジェクトの目的はDSMとオルソモザイクを生成することであり、航空天底画像を使用して撮影されているため、処理に使用するテンプレートは 3Dマップで確認できます [処理] > [処理オプション...]。
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、採石場のDSM(デジタル表面モデル)とオルソモザイク画像を生成するために、プロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して、 [既定のプロジェクト保存場所として使用 すべての新規プロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 新規 プロジェクト ウィザードでは、 画像プロパティ ウィンドウが表示されます。画像のジオロケーションは、画像のEXIFデータから自動的に読み込まれ、WGS84(緯度、経度、高度)座標で示され、垂直座標系は WGS 84楕円体からのジオイド高 が0メートルで指定されます。カメラモデルは、カメラモデルデータベース(SODA_10.6_5472x3648(SI002001AA7C00213)(RGB))から読み込まれます。 11. [次へ]。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 12. [既知の座標系] CH1903 / LV03。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 15. [3Dマップ] テンプレートを選択します。 注: このプロジェクトの目的は DSM とオルソモザイクを生成することであり、航空天底画像を使用して取得されているため、選択するテンプレートは 3D マップ。
16. [完了] ウィザードを終了し、プロジェクトを作成します。 処理 メインウィンドウの下部に
B) GCP(地上基準点)を導入し、マークする。 1. メニュー バーで、 [プロジェクト] > [GCP/MTP マネージャー...]。 GCP(地上基準点)とその座標はインポートされ、 GCP/MTPマネージャー ウィンドウで視覚化できます。 11. GCP/MTP マネージャー ウィンドウで [OK]。 ステップ 1. 初期処理 が完了すると、 rayCloud が開きます。 14. ここで説明されている手順2.~11.に従ってrayCloudを使用してGCPをマークします。 地上基準点(GCP)のインポートとマーク方法を参照してくださいフォルダ内の画像は、 /gcp_overview マークするGCPを識別するのに役立ちます。
C) DSMとオルソモザイクを生成する GCP(地上基準点)がマークされ、プロジェクトが再最適化されたとき。. で 処理 、 1. 初期処理を 、 2. ポイントクラウドとメッシュ 、 3. DSM、オルソモザイク、インデックスを。 |
建物
データセットをダウンロードする か、 PIX4Dcloudで表示してください。
| このプロジェクトの目標は、AscTec Falcon 8 UAVで撮影した建物の3Dモデルを生成することです。. |
|
|

| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | ドイツ |
| 平均地上サンプリング距離(GSD) | 1.89 cm / 0.7 インチ |
| 対象地域 | 未定義 |
| 出力座標系 | WGS84 / UTMゾーン32N 垂直座標系: MSL egm96 |
| 画像取得 | |
| 無人航空機 | AscTec Falcon 8 UAV(Ascending Technologies社製) |
| 画像取得計画 | 1回の飛行、建物の周囲を巡る円形飛行 |
| カメラ | ソニー NEX-5 (RGB) |
| 画像 | |
| 画像数 | 36 |
| 画像サイズ | 4592x3056 |
| 画像の位置情報座標系 | WGS84 |
| GCP | |
| GCPの数 | なし |
| GCP座標系 | なし |
| プロジェクトファイルをダウンロードする |
|---|
|
ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
建物の3Dモデルを生成するためにデータセットを処理するには: プロジェクトを example_building.p4d ダブルクリックして開きます。 注: このプロジェクトの目的は3Dモデルのみを生成すること(DSMとオルソモザイクは生成しない)であるため、処理に使用するテンプレートは 「3Dモデル」で確認できます 「処理」>「処理オプション...」 。
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、建物の3Dモデルを生成するためにプロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して [既定のプロジェクト場所として使用 、すべての新しいプロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 新規 プロジェクト ウィザードでは、 画像プロパティ ウィンドウが表示されます。画像の位置情報は、画像のEXIFデータから自動的に読み込まれ、WGS84(緯度、経度、高度)座標とMSL egm96で示される垂直座標系で表示されます。カメラモデルは、カメラモデルデータベース(NEX-5_E16mmF2.8_16.0_4592x3056(RGB))から読み込まれます。 11.「 次へ」を。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 で [単位]を選択します m。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 注: このプロジェクトの目的は3Dモデルのみを生成すること(DSMやオルソモザイクは生成しない)であり、地上画像を使用して撮影されているため、選択するテンプレートは 3Dモデル テンプレートです。
15. 「 3Dモデル」 テンプレートを選択します。 B) プロジェクトの処理: 1. 処理 をクリックして 「開始」 処理を開始します。 |
地籍
データセットをダウンロードする か、 PIX4Dcloudで表示してください。
| このプロジェクトの目標は、Canon IXUS 120ISを使用して村のDSM(デジタル標高モデル)とオルソモザイク画像を生成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 5.1 cm / 2 インチ |
| 対象地域 | 0.2128 km2 / 21.2822 ha / 0.0822 sq. mi. / 52.6167 acres |
| 出力座標系 | WGS84 / UTMゾーン32N 垂直座標系:WGS84楕円体からのジオイド高 = 0メートル |
| 画像取得 | |
| 無人航空機 | スイングレットCAM(センスフライ) |
| 画像取得計画 | 1便、グリッド飛行計画 |
| カメラ | キヤノン IXUS 120IS (RGB) |
| 画像 | |
| 画像数 | 68 |
| 画像サイズ | 4000x3000 |
| 画像の位置情報座標系 | WGS84 |
| GCP | |
| GCPの数 | なし |
| GCP座標系 | なし |
| プロジェクトファイルをダウンロードする |
|---|
|
ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、データセットを処理して村のDSM(デジタル標高モデル)とオルソモザイク画像を生成する方法について説明します。. 1. プロジェクトファイル example_cadastre.p4d を開きます 2.。メニュー 注: このプロジェクトの目的はDSMとオルソモザイクを生成することであり、航空天底画像を使用して撮影されているため、処理に使用するテンプレートは 3Dマップで確認できます [処理] > [処理オプション...]。
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、村のDSM(デジタル標高モデル)とオルソモザイク画像を生成するために、プロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して、 [既定のプロジェクト保存場所として使用 すべての新規プロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 新規 プロジェクト が表示されます 画像プロパティ 。画像の位置情報は、画像のEXIFデータから自動的に読み込まれます。座標系は自動的にWGS84に設定され、垂直座標系はMSL egm96で指定されます。画像の位置情報はWGS 84で指定され、垂直座標系はWGS 84楕円体からのジオイド高=0であるため、座標系を変更する必要があります。 で [画像ジオロケーション] > [座標系][編集...]。 では 画像プロパティ 、カメラモデルデータベースからカメラモデル(CanonDIGITALIXUS120IS_5.0_4000x3000(RGB))が読み込まれます。 15. 「次へ」。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 を選択します [自動検出]。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 19. [3Dマップ] テンプレートを選択します。 注: このプロジェクトの目的は DSM とオルソモザイクを生成することであり、航空天底画像を使用して撮影されているため、選択するテンプレートは 3D マップ テンプレート。
20. [完了] ウィザードを終了し、プロジェクトを作成します。 処理 メインウィンドウの下部に B) プロジェクトの処理: 1. 処理 をクリックして 「開始」 処理を開始します。 |
構築データセット
| このプロジェクトの目標は、建設現場のオルソモザイク画像と3D点群データを取得することです。. |
|
|


| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 1.83 cm / 0.72 インチ |
| 対象地域 | 0.1326 km2 / 13.2612 ha / 0.0512 sq. mi. / 32.786 acres |
| 出力座標系 | WGS84 / UTMゾーン32N 垂直座標系:WGS84楕円体からのジオイド高 = 0メートル |
| 画像取得 | |
| 無人航空機 | eBee Classic |
| 画像取得計画 | 1便、グリッド飛行計画 |
| カメラ | SODA 10.2 (RGB) |
| 画像 | |
| 画像数 | 197 |
| 画像サイズ | 5472x3648 |
| 画像の位置情報座標系 | WGS84 |
| GCP | |
| GCPの数 | なし |
| GCP座標系 | なし |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、オルソモザイク画像を生成するためにデータセットを処理する方法について説明します。. A) プロジェクトの処理: 1. プロジェクトファイル bim_dataset.p4dをダブルクリックして開きます。 注: このプロジェクトの目的は建設現場のオルソモザイク画像を作成することであるため、 3Dマップ テンプレートが選択されています。
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、プロジェクト全体を対象としたオルソモザイク画像を生成するために、プロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、選択したフォルダ内に、[名前]フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
チェックボックスをオンにして、 既定のプロジェクト保存場所として使用] すべての新規プロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 10. [次へ]。 新規 プロジェクト ウィザードで 「画像プロパティ」 ウィンドウが表示されます。画像の位置情報は、「 画像プロパティ」 セクション 「画像座標系」 ため、変更する必要はありません。画像の位置情報が読み込まれます。 カメラモデルは、カメラモデルデータベース(SODA_10.2_5472x3648 (RGB))から読み込まれます。 11. [次へ]。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 12. ウィンドウの左側で、 3D マップ テンプレートを選択します。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 で [単位]選択します mを。 B) プロジェクトの処理: 1. メニューバーで、 [処理] > [処理オプション...] を開きます [処理オプション] 。 処理が完了すると、 オルソモザイクは で表示および編集できます 。 |
鷲の像 – 手持ちカメラ
| このプロジェクトの目的は、キヤノンEOS 7Dに透視レンズを装着し、地上から画像を撮影することで、鷲の像の3Dモデルを生成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 未定義 |
| 対象地域 | 未定義 |
| 出力座標系 | 任意 |
| 画像取得 | |
| 無人航空機 | なし |
| 画像取得計画 | 像の周囲を2回散策。それぞれ異なる高さから眺める。 |
| カメラ | キヤノン EOS 7D (RGB) |
| 画像 | |
| 画像数 | 44 |
| 画像サイズ | 5184x3456 |
| 画像の位置情報座標系 | なし |
| GCP | |
| GCPの数 | なし |
| GCP座標系 | なし |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、鷲の像の3Dモデルを生成するためにデータセットを処理する方法について説明します。. プロジェクトを example_eagle.p4d ダブルクリックして開きます。 注: このプロジェクトの目的は3Dモデルのみを生成すること(DSMおよびオルソモザイクは生成しない)であり、地上画像を使用して撮影されているため、処理に使用するテンプレートは 「3Dモデルで確認できます 、「処理」>「処理オプション」
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、鷲の像の3Dモデルを生成するためのプロジェクトの作成方法と処理方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して、 [既定のプロジェクト保存場所として使用 すべての新規プロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 新規 プロジェクト が表示されます 「画像プロパティ」 。画像の位置情報は検出されませんでした。カメラモデルはカメラモデルデータベース(CanonEOS7D_EF-S15-85mmf/3.5-5.6ISUSM_15.0_5184x3456 (RGB))から読み込まれます。 11. [次へ]。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 12. 任意座標系 の 単位 。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 注: このプロジェクトの目的は3Dモデルのみを生成すること(DSMとオルソモザイクは生成しない)であり、地上画像を使用して取得されているため、選択するテンプレートは 3Dモデルです。
14. 「 3Dモデル」 テンプレートを選択します。 B) プロジェクトの処理: 1. 処理 バーで、 1. 初期処理を、 2. ポイントクラウドとメッシュの。 注記: 使用された処理領域:
4. 処理領域を編集して、高さが像の高さに合うようにします。rayCloud で処理領域を編集する方法の詳細については、「 rayCloud で処理領域を編集する方法」を。 注: 上記の処理エリアでは、 最大高度 と 最小高度 はそれぞれ 50.00 [m] と -100.00 [m] に設定されています。
で 処理 、 1. 初期処理の、 2. ポイントクラウドとメッシュ。 |

法医学
| このプロジェクトの目標は、法医学現場の点群と3Dテクスチャメッシュを生成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | アメリカ合衆国 |
| 平均地上サンプリング距離(GSD) | 0.24 cm / 0.09 インチ |
| 出力座標系 | WGS84 / UTMゾーン17N |
| 画像取得 | |
| 無人航空機 | DJI Phantom 3 Advanced |
| 画像取得計画 | 1回の飛行、現場周辺を円を描くように飛行 |
| カメラ | FC300 X (RGB) |
| 画像 | |
| 画像数 | 69 |
| 画像サイズ | 4000x3000 |
| 画像の位置情報座標系 | WGS84 |
| GCP | |
| GCPの数 | なし |
| GCP座標系 | なし |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、建物の3Dモデルを生成するためにデータセットを処理する方法について説明します。. プロジェクトを example_forensic.p4d ダブルクリックして開きます。 注: このプロジェクトの目的は点群と3Dモデル(DSMとオルソモザイクなし)を生成することであり、斜め画像を使用して撮影されているため、処理に使用するテンプレートは 「3Dモデル」で確認できます 、[処理] > [処理オプション...] 。
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、建物の3Dモデルを生成するためにプロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して [既定のプロジェクト場所として使用 、すべての新しいプロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 新規 プロジェクト ウィザードでは、 画像プロパティ ウィンドウが表示されます。画像の位置情報は、画像のEXIFデータから自動的に読み込まれ、WGS84(緯度、経度、高度)座標で、垂直座標系は楕円体上のジオイド=0mで指定されます。カメラモデルは、カメラモデルデータベース(FC300X_3.6_4000x3000(RGB))から読み込まれます。 11.「 次へ」を。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 で [単位]を選択します m。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 注: このプロジェクトの目的は点群と3Dモデル(DSMとオルソモザイクは含まない)を生成することであり、斜め画像を使用して撮影されているため、選択するテンプレートは 3Dモデル テンプレートです。
15. 「 3Dモデル」 テンプレートを選択します。 B) プロジェクトの処理: 1. 処理 をクリックして 「開始」 処理を開始します。 |
屋内マッピング – 球体カメラ
| このプロジェクトの目的は、NCTech iSTAR球面カメラで撮影した教会の3Dモデルを作成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スペイン、ア・コルーニャ県ベタンソスにある「サンティアゴ教会」 |
| 平均地上サンプリング距離(GSD) | 未定義 |
| 対象地域 | 未定義 |
| 出力座標系 | 任意座標系 |
| 画像取得 | |
| 無人航空機 | なし |
| 画像取得計画 | 教会での2回の散歩 |
| カメラ | NCTech iSTAR |
| 画像 | |
| 画像数 | 8 |
| 画像サイズ | 10000x5000 |
| 画像の位置情報座標系 | 任意座標系 |
| GCP | |
| GCPの数 | なし |
| GCP座標系 | なし |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、建物の3Dモデルを生成するためにデータセットを処理する方法について説明します。. プロジェクトを example_spherical.p4d ダブルクリックして開きます。 注: このプロジェクトの目的は3Dモデルのみを生成すること(DSMやオルソモザイクは生成しない)であるため、処理用に選択されたテンプレートは 「3Dモデル」で確認できます 「処理」>「処理オプション...」 。
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、建物の3Dモデルを生成するためにプロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して [既定のプロジェクト場所として使用 、すべての新しいプロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 新規 プロジェクト ウィザードで 画像プロパティ ウィンドウが表示されます。画像の位置情報は検出されませんでした。カメラモデルはカメラモデルデータベース(iSTAR_2.7_10000X5000(RGB))から読み込まれます。 11.「 次へ」を。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 12. 任意座標系 の 単位 。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 注: このプロジェクトの目的は 3D モデルのみを生成すること (DSM やオルソモザイクは生成しない) であるため、処理用に選択されたテンプレートは 3D モデル。
14. 「 3Dモデル」 テンプレートを選択します。 B) プロジェクトの処理: 1. 処理 をクリックして 「開始」 処理を開始します。 C)プロジェクトを改善する: 高密度点群と3Dテクスチャメッシュの結果を改善するために、以下の 処理オプション を選択できます。
1. メニューバーで 「処理」 > 「処理オプション...」 注: この選択により、元の画像サイズを使用してキーポイントを抽出できます。
5. [処理オプション] ウィンドウ [2. ポイントクラウドとメッシュ]。 注: 元の画像サイズを使用して追加の 3D ポイントを計算します。特に特徴を簡単に一致させることができる領域では、より多くのポイントが計算されます。 高ポイント密度、画像スケールのピクセルごとに 3D ポイントが計算されます。処理オプションの詳細については、 メニューの処理 > 処理オプション... > 2. ポイントクラウドとメッシュ > ポイントクラウドを参照してください。
8. [OK]。 |
工業用建物 – パロット・ビバップ2
データセットをダウンロードする か、 PIX4Dcloudで表示してください。
| このプロジェクトの目的は、工業用建物の3Dモデルを作成することです。画像はParrot Bebop 2とPIX4Dcaptureを使用して取得しました。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | フランス、ナント |
| 平均地上サンプリング距離(GSD) | 9.25 cm / 3.64 インチ |
| 対象地域 | 0.0113 km2 / 1.13 ha / 0.0043 sq. mi. / 2.79 acres |
| 出力座標系 | WGS84 / UTMゾーン30N 垂直座標系: MSL egm96 |
| 画像取得 | |
| 無人航空機 | パロット・ビバップ2 |
| 画像取得ソフトウェア | PIX4Dキャプチャ |
| 画像取得計画 | グリッドミッションとサーキュラーミッション |
| カメラ | ビバップ2カメラ |
| 画像 | |
| 画像数 | 138 |
| 画像サイズ | 4096x3320 |
| 画像の位置情報座標系 | WGS84 |
| プロジェクトファイルをダウンロードする |
|---|
|
ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、Parrot Bebop 2 を使用して建物の 3D テクスチャ付きメッシュを生成するために、データセットを処理する方法について説明します。. 1. プロジェクト example_bebop2_industrial_building.p4d。 注: このプロジェクトの目的は3Dテクスチャ付きメッシュ(DSMおよびオルソモザイクなし)を生成することであるため、処理に使用するテンプレートは 「3Dモデル」で確認できます 「処理」>「処理オプション」
3. 処理 をクリックして 「開始」 処理を開始します。 |
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、住宅の3Dメッシュを生成するためにプロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4D Desktop を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して、 [既定のプロジェクト保存場所として使用 すべての新規プロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加... を選択して 画像 プロジェクトに画像を追加します。このフォルダには、グリッドミッションと円形飛行の画像が含まれています。 [選択] をクリックします。10 新規 プロジェクト ウィザードでは、 画像プロパティ ウィンドウが表示されます。画像の位置情報は、画像のEXIFデータから自動的に読み込まれ、WGS84(緯度、経度、高度)座標系で、垂直座標系はMSL = egm96で指定されます。カメラモデルは、カメラモデルデータベース(Bebop2_1.8_4096x3320(RGB))から読み込まれます。 11. [次へ]。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 12. 既知の座標系 と 高度な座標オプションを選択します。 をクリックし [リストから...] 、 World Geodetic System 1984 datum と WGS 84 / UTM zone 30N 座標系を [OK]。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 15. [3Dモデル] テンプレートを選択します。 [完了] ウィザードを終了します。 処理 メインウィンドウの下部に B) プロジェクトの処理: 16. 処理バーで、 1. 初期処理を 、 2. ポイントクラウドとメッシュの。 注: PIX4DmapperはBebop2の画像内の空を自動的に検出し、高密度点群を改善します。
処理オプションの詳細については、 メニュー プロセス > 処理オプション... > 1. 初期処理 > キャリブレーション を参照してください。
と 初期処理 、 rayCloud が開きます。 18. rayCloud を使用して 処理領域 、背景からノイズの多い点を除去して、建物の点のみを残します。rayCloud を使用して処理領域を描画する方法の詳細については、 「PIX4Dmapper Desktop で処理領域を使用する方法」を。 注記: 使用された処理領域:
19. 処理領域を編集して、関心のある領域に焦点を合わせます。rayCloud で処理領域を編集する方法の詳細については、「 rayCloud で処理領域を編集する方法」を。 注: 上記の処理エリアでは、 最大高度 と 最小高度 はそれぞれ 50.00 [m] と -10.00 [m] に設定されています。
20. 処理 バーで、 1. 初期処理の、 2. ポイントクラウドとメッシュ。 |

オフィスビル – DJI
データセットをダウンロードする か、 PIX4Dcloudで表示してください。
| このプロジェクトの目標は、DJI Phantom 4を使用して建物の3Dモデルを作成し、PIX4Dcaptureで画像を取得することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 1.67 cm / 0.65 インチ |
| 出力座標系 | WGS84 / UTMゾーン32N 垂直座標系: MSL egm96 |
| 画像取得 | |
| 無人航空機 | DJI Phantom 4 |
| 画像取得ソフトウェア | PIX4Dキャプチャ |
| 画像取得計画 | 円形軌道、画像間の角度は4度、地上30メートル。. |
| カメラ | ファントムビジョンFC330 |
| 画像 | |
| 画像数 | 85 |
| 画像サイズ | 4000x3000 |
| 画像の位置情報座標系 | WGS84 |
| プロジェクトファイルをダウンロードする |
|---|
|
ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
|
このセクションでは、付属の.p4dプロジェクトファイルを使用してデータセットを処理し、建物の3Dメッシュを生成する方法について説明します。. 1. プロジェクトファイル 「dji_demo.p4d」を。 注: このプロジェクトの目的は 3D モデルを取得することなので、処理に使用するテンプレートは 3D モデルで確認できます 処理 > 処理オプション...。 、
|
熱
| このプロジェクトの目的は、FLIR Zenmuse XTサーマルカメラを使用して熱画像マップを作成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 9.24 cm / 3.64 インチ |
| 対象地域 | 0.035 km2 / 3.4685 ha / 0.01 sq. mi. / 8.5753 acres |
| 出力座標系 | WGS84 / UTMゾーン32N 垂直座標系:WGS84楕円体からのジオイド高 = 0メートル |
| 画像取得 | |
| 無人航空機 | DJI Inspire 1 |
| 画像取得計画 | 2便、グリッド飛行計画(90%-90%重複) |
| カメラ | FLIR Zenmuse XT(サーマルイメージング) |
| 画像 | |
| 画像数 | 152 |
| 画像サイズ | 640x512 |
| 画像の位置情報座標系 | WGS84 |
| GCP | |
| GCPの数 | GCPなし |
| GCP座標系 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
注: ご覧ください。 こちらを
|
| 説明書 |
|---|
| 付属の.p4dプロジェクトファイルを使用してデータセットを処理します。 |
|
このセクションでは、データセットを処理して対象地域の熱分布図を作成する方法について説明します。. 1. プロジェクト 「thermal.p4d」を 注: このプロジェクトの目的は熱画像マップを生成することであるため、処理に使用するテンプレートは 「サーマルカメラ」で確認できます [処理] > [処理オプション...]。
も必ず確認してください 。
 3. 処理 をクリックして 「開始」 処理を開始します。
|
| データセットを処理して新しいプロジェクトを作成します |
|
このセクションでは、熱マップを生成するためにプロジェクトを作成および処理する方法について説明します。. A) 新しいプロジェクトを作成する: 1. PIX4Dmapper を起動します。 注: プロジェクトが作成されると、 [名前] フィールドに入力されたプロジェクト名と同じ名前のフォルダが作成され、すべての結果がそこに保存されます。.p4dプロジェクトファイルもこのフォルダに保存されます。
] チェックボックスを選択して、 [既定のプロジェクト保存場所として使用 すべての新規プロジェクトを選択したフォルダーに保存します。 新規 プロジェクト ウィザードを開くと、 「画像の選択」 ウィンドウが表示されます。 9. [ディレクトリの追加...] を選択して 画像 プロジェクトに画像を追加します。 画像がRJPG形式であるため、ソフトウェアは自動的にそれらをサーマルTIFF画像に変換し、 「Converted」という名前のフォルダに保存します。 ソフトウェアはこれらの画像を使用して処理を行います。 新規 プロジェクト が表示されます 、画像プロパティ 。画像の位置情報は、画像のEXIFデータから自動的に読み込まれ、WGS84(緯度、経度、高度)座標で示され、垂直座標系は WGS84楕円体からのジオイド高 が0メートルで指定されます。カメラモデルは、カメラモデルデータベース(FLIR Zenmuse XT(サーマル))から読み込まれます。 11. [次へ]。 新規 プロジェクト ウィザードを開くと、 「出力座標系の選択」 ウィンドウが表示されます。デフォルトでは、ソフトウェアで最後に選択された出力座標系が選択されます。 12. [自動検出]。 新規 プロジェクト ウィザードを開くと、「 処理オプションテンプレート」 ウィンドウが表示されます。 15. 「サーマルカメラ」 テンプレートを選択し、生成される thermal_ir インデックスを確認します。
16. [完了] ウィザードを終了し、プロジェクトを作成します。 処理 メインウィンドウの下部に 17. ステップ1、ステップ2、ステップ3を実行します。 18. 熱マップを確認/視覚化します。 等間隔 と24のクラス数を使用することをお勧めします。
|


 PIX4Dmaticのサンプルプロジェクト
PIX4Dmaticのサンプルプロジェクト
工業地帯と農業地帯
|
このプロジェクトの目標は以下のとおりです。
|
|
このデータセットは、1469枚の画像(senseFly、AeriaX)と8つのGCP(地上基準点)で構成されており、工業地帯、郊外の住宅地、および周辺の農地が含まれています。高密度の点群、画像、およびGCPは3Dビューで表示されます。. |

情報: この1469枚の画像からなるサンプルプロジェクトは、 10615枚の画像からなるより大きなデータセットのサブセット。データセット全体の画像取得は、4機のeBee X - senseFlyドローンを同時に飛行させて行いました。飛行計画ソフトウェアにはeMotionを使用しました。
データセット全体をダウンロードするには、 Pix4Dサポート チームにお問い合わせください(Pix4D製品の有効なライセンスが必要です。試用版ライセンスも有効とみなされます)。
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 2.28 cm / 0.9 インチ |
| 対象地域 | 1.154 km2 / 115.4 ha / 0.446 sq. mi. / 285.3 acres |
| 出力座標系 | WGS 84 / UTMゾーン32N - EPSG 32632、WGS 84楕円体 |
| 画像取得 | |
| 無人航空機 | eBee X (senseFly) |
| 画像取得計画 | 4便、単一グリッド飛行計画 |
| カメラ | センスフライ エアリアックス |
| 画像 | |
| 画像数 | 1469 |
| 画像サイズ | 6000 x 4000ピクセル |
| 画像の位置情報座標系 | WGS84 - EPSG 4326、WGS 840楕円体 |
| 地上基準点(GCP) | |
| GCPの数 | 8 |
| GCP座標系 | WGS84 - EPSG 4326、WGS 84楕円体 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (14.7 GB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| .p4m PIX4Dmaticプロジェクトファイルを開きます。 |
|
このセクションでは、.p4mプロジェクトを開く方法について説明します。.
プロジェクトが正常にインポートされると、画像とGCP(地上基準点)が3Dビューに表示されます。. |
| 処理済み結果をダウンロード |
|
処理結果を含む圧縮フォルダは、 こちらから (16GB)。 試用版ライセンスでは出力のエクスポートができません。処理済みの結果をダウンロードして、サードパーティ製ソフトウェアにインポートしてください。. |
都市部
|
このプロジェクトの目標は以下のとおりです。
|
|
100枚の画像(senseFly、AeriaX)と3つの地上基準点(GCP)を含むデータセットを、ある町の上空で飛行して取得した。高密度の点群、画像、およびGCPは3Dビューに表示される。. |

情報: この100枚の画像からなるサンプルプロジェクトは、 10615枚の画像からなる大規模データセットのサブセット。データセット全体の画像取得は、4機のeBee X - senseFlyドローンを同時に飛行させて行いました。飛行計画ソフトウェアにはeMotionを使用しました。
データセット全体をダウンロードするには、 Pix4Dサポート チームにお問い合わせください(Pix4D製品の有効なライセンスが必要です。試用版ライセンスも有効とみなされます)。
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 2.41 cm / 0.95 インチ |
| 対象地域 | 0.0214 km2 / 2.14 ha / 0.008 sq. mi. / 5.3 acres |
| 出力座標系 | WGS 84 / UTMゾーン32N - EPSG 32632、WGS 84楕円体 |
| 画像取得 | |
| 無人航空機 | eBee X (senseFly) |
| 画像取得計画 | 1フライト、単一グリッド飛行計画 |
| カメラ | センスフライ エアリアックス |
| 画像 | |
| 画像数 | 100 |
| 画像サイズ | 6000 x 4000ピクセル |
| 画像の位置情報座標系 | WGS84 - EPSG 4326、WGS 84楕円体 |
| 地上基準点(GCP) | |
| GCPの数 | 3 |
| GCP座標系 | WGS84 - EPSG 4326、WGS 84楕円体 |
| GCPの種類 |
|

| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (0.99 GB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| .p4m PIX4Dmaticプロジェクトファイルを開きます。 |
|
このセクションでは、.p4mプロジェクトを開く方法について説明します。.
プロジェクトが正常にインポートされると、画像とGCP(地上基準点)が3Dビューに表示されます。. |
| 処理済み結果をダウンロード |
|
処理済みの結果を含む圧縮フォルダは、 こちらから (4.6GB)。 試用版ライセンスでは出力のエクスポートができません。処理済みの結果をダウンロードして、サードパーティ製ソフトウェアにインポートしてください。. |
PIX4Dcatchプロジェクト
|
このプロジェクトの目標は以下のとおりです。
|
|
このデータセットには、雨水収集設備を撮影した300枚の画像ファイルとLiDAR深度データ(Confidence.tiffおよびDepthMap.tiffファイル)が含まれています。Dense/Depth/Depth & dense融合点群とカメラ位置は3Dビューに表示されます。. |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 0.3 cm / 0.13 インチ |
| 対象地域 | 175 平方メートル / 0.0175 ヘクタール / 0.043 エーカー |
| 出力座標系 | WGS 84 / UTMゾーン32N - EPSG 32632、WGS 84楕円体 |
| 画像取得 | |
| デバイス | iPad Pro 11インチ |
| 画像取得計画 | 地上、円形 |
| カメラ | LiDAR搭載iPad Pro |
| 画像 | |
| 画像数 | 300 |
| 画像サイズ | 1920 x 1440ピクセル |
| 画像の位置情報座標系 | WGS84 - EPSG 4326、WGS 84楕円体 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (367MB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| .p4m Pix4Dmatic プロジェクト ファイルを開きます。 |
|
このセクションでは、.p4mプロジェクトを開く方法について説明します。. アクセス方法: PIX4Dmaticをダウンロードするには、 こちらを。
プロジェクトを処理するには、 画像を検索する必要があります。 まず
|
| 処理済み結果をダウンロード |
|
処理結果を含む圧縮フォルダは、 こちらから (902MB)。 試用版ライセンスでは出力のエクスポートができません。処理済みの結果をダウンロードして、サードパーティ製ソフトウェアにインポートしてください。. |
PIX4Dmaticによる地上レーザースキャンプロジェクト
|
このプロジェクトの目標は以下のとおりです。
|
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 2.39 cm / 0.94 インチ |
| 対象地域 | 0.0441 km2 / 4.41 ha / 0.017 sq. mi. / 10.90 acres |
| 出力座標系 | CH1903+ / LV95 垂直座標系:ベッセル1841楕円体上のジオイド高 = 0メートル |
| 画像取得 | |
| 無人航空機 | eBee X (senseFly) |
| 画像取得計画 | 2フライト、単一グリッド飛行計画 |
| カメラ | センスフライソーダ. |
| 画像 | |
| 画像数 | 101 |
| 画像サイズ | 5472x3648 |
| 画像の位置情報座標系 | WGS84 |
| 地上レーザースキャン | |
| レーザースキャナー | ライカ RTC360 3Dレーザースキャナー |
| スキャン回数¹ | 2 |
| ポイント数² | 3,549,517 - 橋 5,327,201 - 村 |
| レーザー点群座標系 | CH1903+ / LV95、ベッセル1841楕円体 |
¹ 合計12台のレーザースキャンステーションを使用して2つのシーンを完全にキャプチャし、2つの最終的な点群を生成しました。
² 点群をクリーニングし、点群の解像度を下げた後の点の数。
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (1.6GB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| .p4m PIX4Dmaticプロジェクトファイルを開きます。 |
|
このセクションでは、.p4mプロジェクトを開いてベクター化の設定を行う方法について説明します。. アクセス方法: PIX4Dmaticをダウンロードするには、 こちらを。
インポートが完了すると、点群データとキャリブレーション済みの画像が表示されます。これで、 ベクトル化を プロジェクトの |
郊外地域
|
このプロジェクトの目標は以下のとおりです。
|
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | アメリカ合衆国コロラド州デンバー |
| 平均地上サンプリング距離(GSD) | 1.13 cm / 0.44 インチ |
| 対象地域 | 0.041 km2 / 4.1 ha / 0.02 sq. mi. / 10.17 acres |
| 出力座標系 | NAD 1983 コロラド州中央州道 FIPS 0502 フィート 垂直座標系: EGM 96 |
| 画像取得 | |
| 無人航空機 | DJI Phantom 4 Pro |
| 画像取得計画 | 1フライト、ダブルグリッド飛行計画 |
| カメラ | DJI Phantom 4 Pro |
| 画像 | |
| 画像数 | 188 |
| 画像サイズ | 5472x3648 |
| 画像の位置情報座標系 | WGS84 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (1.6GB) ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| .p4m PIX4Dmaticプロジェクトファイルを開きます。 |
|
このセクションでは、.p4sプロジェクトを開いてベクトル化の設定を行う方法について説明します。. アクセス方法: PIX4Dmaticをダウンロードするには、 こちらを。
インポートが完了すると、点群データとキャリブレーション済みの画像が表示されます。これで、 ベクトル化を プロジェクトの |
| 処理済み結果をダウンロード |
|
処理結果を含む圧縮フォルダは、 こちらから (472MB)。 試用版ライセンスでは出力のエクスポートができません。処理済みの結果をダウンロードして、サードパーティ製ソフトウェアにインポートしてください。. |
 PIX4Dfieldsのサンプルプロジェクト
PIX4Dfieldsのサンプルプロジェクト
ロストック・セコイア・マルチスペクトル
| このプロジェクトの目標は、緑、赤、レッドエッジ、近赤外線波長を捉えるSequoiaカメラを使用して、圃場のNDVI指数マップを取得することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | ドイツ |
| 平均地上サンプリング距離(GSD) | 10.0 cm / 3.94 インチ |
| 対象地域 | 0.449 km2 / 44.9 ha / 0.173 sq. mi. / 110.95 acres |
| 出力座標系 | WGS84 / ローカル横メルカトル図法 |
| 画像取得 | |
| 無人航空機 | eBee(senseFly) |
| 画像取得計画 | 1回の飛行、グリッド飛行計画、飛行高度106メートル |
| カメラ | セコイア(グリーン、レッド、レッドエッジ、近赤外線) |
| 画像 | |
| 画像数 | 1804 |
| 画像サイズ | 1280x960 |
| 画像の位置情報座標系 | WGS84 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
|
PIX4Dfieldsで新しいプロジェクトを開始する |
| データセットの処理を開始するには、ガイド 「初めての植生指数マップ - PIX4Dfields」 |
ロストックSODA RGBカメラ
| このプロジェクトの目標は、赤、緑、青の波長を捉えるSODAカメラを使用して、圃場のVARI指数マップを取得することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | ドイツ |
| 平均地上サンプリング距離(GSD) | 2.80 cm / 1.10 インチ |
| 対象地域 | 0.483 km2 / 48.3 ha / 0.186 sq. mi. / 119.35 acres |
| 出力座標系 | WGS84 / ローカル横メルカトル図法 |
| 画像取得 | |
| 無人航空機 | eBee(senseFly) |
| 画像取得計画 | 1回の飛行、グリッド飛行計画、飛行高度119メートル |
| カメラ | ソーダ(赤、緑、青) |
| 画像 | |
| 画像数 | 374 |
| 画像サイズ | 5472x3648 |
| 画像の位置情報座標系 | WGS84 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから。 ダウンロードしたフォルダには、以下のファイルとフォルダが含まれています。
|
|
PIX4Dfieldsで新しいプロジェクトを開始する |
| データセットの処理を開始するには、ガイド 「初めての植生指数マップ - PIX4Dfields」 |
 PIX4Dreactのサンプルプロジェクト
PIX4Dreactのサンプルプロジェクト
バハマのハリケーン被害
| このプロジェクトは、PIX4Dreactを使用して災害後の迅速な地図作成を行うことを目的としています。 |
 |
| プロジェクト全般に関する情報 | |
| プロジェクト | |
| 位置 | バハマ |
| 平均地上サンプリング距離(GSD) | 2cm |
| 対象地域 | 20ヘクタール |
| 画像取得 | |
| 画像取得計画 | グリッド飛行計画 |
| カメラ | Zenuse X5S |
| 画像 | |
| データセットのサイズ | 1.62 GB |
| 画像数 | 181 |
| 画像の位置情報座標系 | WGS84 |
| サンプルプロジェクトをダウンロード |
|
サンプルプロジェクトは ここから。 ダウンロードしたzipアーカイブを解凍する必要があります。フォルダにはJPG形式の画像が含まれています。 |
ベルビュー通り
| このプロジェクトの目的は、Parrot Anafiドローンを使用して住宅地の地図を作成することです。. |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | コロラド州(アメリカ合衆国) |
| 平均地上サンプリング距離(GSD) | 2.64 cm / 1.04 インチ |
| 対象地域 | 0.12 km2 / 11.86 ヘクタール / 0.05 平方マイル |
| 出力座標系 | WGS84 / ユニバーサル横メルカトル図法 ゾーン13N |
| 画像取得 | |
| 無人航空機 | オウムのアナフィ |
| 画像取得計画 | 1便、グリッド飛行計画 |
| カメラ | Anafi 4K 1.5.6 |
| 画像 | |
| データセットのサイズ | 208 MB |
| 画像数 | 38 |
| 画像の幅 | 5344ピクセル |
| 画像の高さ | 4016ピクセル |
| 画像の位置情報座標系 | WGS84 |
| サンプルプロジェクトをダウンロード |
|---|
|
サンプルプロジェクトは ここから。 ダウンロードしたzipアーカイブを解凍してください。解凍されたフォルダにはJPG形式の画像ファイルが含まれています。. |
ドミニカのハリケーン被害
| このプロジェクトは、Pix4Dreactを使用して災害後の迅速な地図作成を行うことを目的としています。 |
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | ルビエール(ドミニカ) |
| 平均地上サンプリング距離(GSD) | 13.23 cm / 5.21 インチ |
| 対象地域 | 45.22ヘクタール |
| 出力座標系 | WGS84 / ユニバーサル横メルカトル図法 ゾーン20N |
| 画像取得 | |
| 画像取得計画 | グリッドフライトプラン |
| カメラ | Zenmuse X4S |
| 画像 | |
| データセットのサイズ | 1.2 GB |
| 画像数 | 155 |
| 画像の幅 | 9234ピクセル |
| 画像の高さ | 5414ピクセル |
| 画像の位置情報座標系 | WGS84 |
| サンプルプロジェクトをダウンロード |
|---|
|
サンプルプロジェクトは ここから。 ダウンロードしたzipアーカイブを解凍してください。解凍されたフォルダにはJPG形式の画像ファイルが含まれています。. |
オープンフォトグラメトリフォーマット(OPF)のサンプルプロジェクト
ナディールドローンプロジェクト
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 2.39 cm / 0.94 インチ |
| 対象地域 | 0.0441 km2 / 4.41 ha / 0.017 sq. mi. / 10.90 acres |
| 出力座標系 | CH1903+ / LV95 垂直座標系:ベッセル1841楕円体上のジオイド高 = 0メートル |
| 画像取得 | |
| 無人航空機 | eBee X (senseFly) |
| 画像取得計画 | 2フライト、単一グリッド飛行計画 |
| カメラ | センスフライソーダ. |
| 画像 | |
| 画像数 | 101 |
| 画像サイズ | 5472x3648 |
| 画像の位置情報座標系 | WGS84 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (1.74 GB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| OPFプロジェクトをPIX4Dmaticにインポートする |
|
このセクションでは、OPFプロジェクトをインポートする方法について説明します。.
|
ヒント: PythonでもOPFファイルを操作できます。詳細については、pyopfパッケージ (https://github.com/Pix4D/pyopf)。
ライダーデータを用いた地上スキャン - PIX4Dcatch
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 0.3 cm / 0.13 インチ |
| 対象地域 | 175 平方メートル / 0.0175 ヘクタール / 0.043 エーカー |
| 出力座標系 | WGS 84 / UTMゾーン32N - EPSG 32632、WGS 84楕円体 |
| 画像取得 | |
| デバイス | iPad Pro 11インチ |
| 画像取得計画 | 地上、円形 |
| カメラ | LiDAR搭載iPad Pro |
| 画像 | |
| 画像数 | 300 |
| 画像サイズ | 1920 x 1440ピクセル |
| 画像の位置情報座標系 | WGS84 - EPSG 4326、WGS 84楕円体 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (689MB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| OPFプロジェクトをPIX4Dmaticにインポートする |
|
このセクションでは、OPFプロジェクトをインポートする方法について説明します。.
|
ヒント: PythonでもOPFファイルを操作できます。詳細については、pyopfパッケージ (https://github.com/Pix4D/pyopf)。
地上スキャン - PIX4Dcatch
 |
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 0.2 cm / 0.08 インチ |
| 対象地域 | 82 平方メートル / 0.0082 ヘクタール / 0.020 エーカー |
| 出力座標系 | ETRS89 / UTMゾーン32N - EPSG:25832、GRS 1980楕円体上の楕円体高 |
| 画像取得 | |
| デバイス | iPhone 13 |
| 画像取得計画 | 地上、円形 |
| カメラ | iPhone 13 |
| 画像 | |
| 画像数 | 117 |
| 画像サイズ | 1440 x 1920ピクセル |
| 画像の位置情報座標系 | ETRS89 - EPSG:4258、GRS 1980楕円体上の楕円体高 |
| プロジェクトファイルをダウンロードする |
|---|
|
データセットは こちらから (208MB) ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
|---|
| OPFプロジェクトをPIX4Dmaticにインポートする |
|
このセクションでは、OPFプロジェクトをインポートする方法について説明します。. アクセス方法: PIX4Dmaticをダウンロードするには、 こちらを。
|
工業地帯と農業地帯 - OPF
このプロジェクトの目標は以下のとおりです。
|
 |
情報: この135枚の画像からなるサンプルプロジェクトは、 10615枚の画像からなる大規模データセットのサブセット。データセット全体の画像取得は、4機のeBee X - senseFlyドローンを同時に飛行させて行いました。飛行計画ソフトウェアにはeMotionを使用しました。
データセット全体をダウンロードするには、 Pix4Dサポート チームにお問い合わせください(Pix4D製品の有効なライセンスが必要です。試用版ライセンスも有効とみなされます)。
| プロジェクト全般に関する情報 | |
|---|---|
| プロジェクト | |
| 位置 | スイス |
| 平均地上サンプリング距離(GSD) | 2.28 cm / 0.9 インチ |
| 対象地域 | 0.131 km2 / 13.1 ha / 0.05 sq. mi. / 32.37 acres |
| 出力座標系 | WGS 84 / UTMゾーン32N - EPSG 32632、WGS 84楕円体 |
| 画像取得 | |
| デバイス | eBee X (senseFly) |
| 画像取得計画 | 4便、単一グリッド飛行計画 |
| カメラ | センスフライ エアリアックス |
| 画像 | |
| 画像数 | 135 |
| 画像サイズ | 6000 x 4000ピクセル |
| 画像の位置情報座標系 | WGS84 - EPSG 4326、WGS 840楕円体 |
| 地上基準点(GCP) | |
| GCPの数 | 3 |
| GCP座標系 | WGS84 - EPSG 4326、WGS 84楕円体 |
| プロジェクトファイルをダウンロードする |
|
データセットは こちらから (2.41 GB)。 ダウンロードした圧縮ファイル(.zip)には、以下のファイルとフォルダが含まれています。
|
| 説明書 |
| OPFプロジェクトファイルを開く |
|
アクセス方法: PIX4Dmaticをダウンロードするには、 こちらを。
プロジェクトが正常にインポートされると、画像とGCP(地上基準点)が3Dビューに表示されます。. |
ヒント: PythonでもOPFファイルを操作できます。詳細については、pyopfパッケージ (https://github.com/Pix4D/pyopf)。