
輸入
画像の位置情報と向きのインポート形式
画像位置情報ファイルの形式は.csvまたは.txtファイルです。1行あたり7列または9列で構成され、列区切り文字としてカンマ「,」を使用します。
注記: .csv ファイルまたは .txt ファイルにはヘッダーを含めないでください。ファイルのヘッダーにコメントを追加するには、最初の行の先頭に特殊文字「#」を使用します。例:
#画像名、座標1、座標2、z、ヨー、ピッチ、ロール IMG_3165.JPG、46.2345612、6.5611445、539.931、38.6、3.5、8.3 IMG_3166.JPG、46.2323423、6.5623423、529.823、44.1、3.4、5.4
注: 入力ファイル内の座標の順序は、 座標系定義の軸の順序に従う インポートダイアログで選択した
例えば、座標系の定義で、最初の軸がX軸、2番目の軸がY軸と指定されている場合、GCP入力ファイル内の座標の順序も同じである必要があります。.
詳細については、 「座標系定義」セクションの「軸の順序を確認する方法」を 。
各フォーマットについては、以下の表に記載されています。
| 地理座標、ヨー、ピッチ、ロール |
| 画像名、座標1* [十進度]、座標2* [十進度]、z [メートル]、ヨー [十進度]、ピッチ [十進度]、ロール [十進度] |
IMG_3165.JPG,46.2345612,6.5611445,539.931,38.6,3.5,8.3 |
| 緯度の値は-90°から90°の間です。 経度の値は-180°から180°の間です。 |
| 地理座標、ヨー、ピッチ、ロール、および精度値 |
| 画像名、座標1* [単位]、座標2* [単位]、z [メートル]、ヨー [十進度]、ピッチ [十進度]、ロール [十進度]、水平精度 [メートル]、垂直精度 [メートル] |
IMG_3165.JPG,46.2345612,6.5611445,539.931,38.6,3.5,8.3,0.02,0.04 |
| 緯度の値は-90°から90°の間です。 経度の値は-180°から180°の間です。 |
| 投影座標、ヨー、ピッチ、ロール |
| 画像名、座標1* [単位]、座標2* [単位]、z [単位]、ヨー [十進度]、ピッチ [十進度]、ロール [十進度] |
IMG_3165.JPG,474191.175,5091809.612,539.931,38.6,3.5,8.3 |
| 投影座標、ヨー、ピッチ、ロール、および精度値 |
| 画像名、座標1* [単位]、座標2* [単位]、z [メートル]、ヨー [十進度]、ピッチ [十進度]、ロール [十進度] |
IMG_3165.JPG,474191.175,5091809.612,539.931,38.6,3.5,8.3,0.02,0.04 |
| 地理座標 |
| 画像名、座標1* [十進度]、座標2* [十進度]、z [メートル] |
IMG_3165.JPG,46.2345612,6.5611445,539.931 |
| 投影座標 |
| 画像名、座標1* [単位]、座標2* [単位]、z [メートル] |
IMG_3165.JPG,474191.175,5091809.612,539.931 |
| 精度値付き地理座標 |
| 画像名、座標1* [十進度]、座標2* [十進度]、z [メートル]、水平精度 [メートル]、垂直精度 [メートル] |
IMG_3165.JPG,46.2345612,6.5611445,539.931,0.02,0.04 |
| 精度値を含む投影座標 |
| 画像名、座標1* [単位]、座標2* [単位]、z [メートル]、水平精度 [メートル]、垂直精度 [メートル] |
IMG_3165.JPG,474191.175,5091809.612,539.931,0.02,0.04 |
画像の位置情報と向きのファイルをインポートする方法
PIX4Dmaticにファイルをインポートするには:
- を開く PIX4Dmatic
- 新しいプロジェクトを作成するか、既存のプロジェクトを開きます。
- 画像をインポートする
- 画像の位置情報と向きのファイルをインポートします。
- に移動する ファイル>インポート>画像の位置情報と向き か、
- を選択し
 カメラ」 、 「画像の位置情報と向きをインポート」をクリックします。
カメラ」 、 「画像の位置情報と向きをインポート」をクリックします。
- インポートウィンドウが開きます

- .csv または .txt ファイルに移動して、 [開く]
- ファイルに合わせて座標参照系(水平座標系と垂直座標系)を選択してください。.
- 必要に応じて、ジオイドおよび/またはジオイド高の値を選択してください。
- をクリックしてください 「適用」
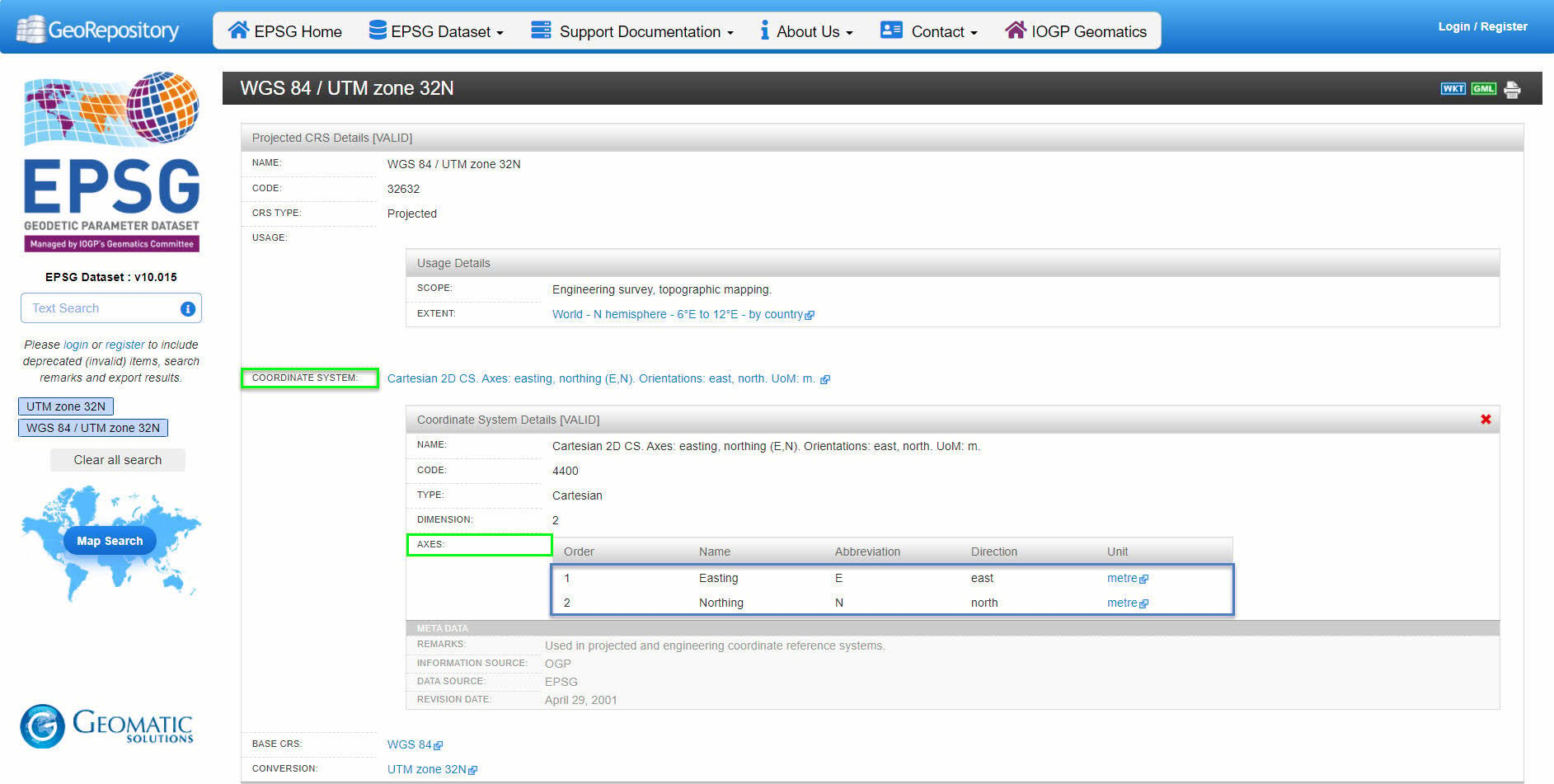
座標系定義における軸の順序を確認する方法
座標系定義における軸の順序を確認するには:
- を開いてください EPSG測地パラメータ登録 。
- に、名前またはEPSGコードを入力してください EPSGデータセットのテキスト検索。
- をクリックし 「GO」 、検索結果から正しい名前を選択してください。
- を展開し 「座標系」 の順序を確認してください 「軸」 。
座標系定義における軸の順序を確認した後、入力ファイルを修正して、同じ順序の座標になるようにします。.
例: WGS 84 / UTMゾーン32N(EPSGコード32632)の場合、座標系定義における軸の順序は、 東座標が 、 北座標が。GCPファイルは次のようにフォーマットする必要があります。
ラベル、東座標[メートル]、北座標[メートル]、z座標[メートル]
画像の位置情報と向きをエクスポートする
画像の位置情報と向きのファイルをエクスポートするには:
- を選択します。 カメラ」 タブ
- をクリックしてください
 。
。  「画像の位置情報と向きをエクスポート」
「画像の位置情報と向きをエクスポート」 - エクスポートウィンドウが開きます

ファイルのエクスポート前に、以下のパラメータを設定できます。
| パラメータ | 説明 | オプション |
| カメラの種類 | 位置情報と方位を取得するカメラの種類を設定します。. |
|
| CRSをエクスポート | エクスポートされたデータの座標参照系を指定します。 |
|
| カメラの向きに関する規則 | カメラの向きを解釈するために使用される標準規格を指定します。. |
|
| 行き先 | ファイルの保存場所または共有場所を指定します。 | |
必要なパラメータを設定したら、 「エクスポート」 で指定した場所にファイルをエクスポートします 宛先 。ステータスバーにはエクスポートの進行状況が表示されます。エクスポートが完了すると、 .csv ファイルが作成され、後で使用できます。