重要: PIX4DcatchはAndroid端末のみでサイトローカライズに対応しています。iOS端末はサイトローカライズに対応していません。
PIX4Dcatchのサイト位置特定機能を使用すると、ローカル座標系での作業や、ローカル座標系とグローバル座標系間の点変換が可能になります。既存の点をインポートしたり、現場で新しい点を計測したりできます。PIX4Dcatchは、PIX4D対応RTKデバイス、またはサードパーティ製デバイスを使用して点を取得できます。.
この記事では
新しいポイントコレクションを作成する
ローカルポイントを追加する
ローカルポイントをインポートする
ポイントを定義する
を追加する グローバル
グローバルポイント
グローバルポイントをインポートする
ポイントを
サイトローカリゼーション
残差を
計算されたサイトローカリゼーション オプションと出力
WKT ファイルをエクスポートする
サイトローカリゼーションを編集する
ローカライズされたファイルをエクスポートする
結果を表示する
サイトローカライズされたプロジェクトを処理する
ローカライズされたプロジェクトを PIX4Dcloud Starter / PIX4Dcloud Pro にアップロードして処理する
PIX4Dmatic Standard / PIXDmatic Pro を使用してローカルで処理する
新しいポイントコレクションを作成する
- メイン画面から 「新規ポイント収集」 ボタン
 を開きます ポイント管理 。
を開きます ポイント管理 。 - タップする
 ポイントを保存する新しいポイントコレクションを作成するためのボタン。.
ポイントを保存する新しいポイントコレクションを作成するためのボタン。.

- をタップします 「サイトの地域設定」。
- ポイントコレクションの名前を入力し、 「作成」。
新しいポイントコレクションが作成され、ポイント獲得の準備が整いました。.
サイトローカリゼーションを実行すると、グローバル座標系とローカル座標系の 2 つの座標系が暗黙的に定義されます。グローバル座標系はグローバルポイントに使用され、既知のパラメータを持つ定義済みの座標系です。サイトローカリゼーションでは、地理座標参照系のみを使用できます。つまり、測定値またはインポートされたポイントは常に度数で表されます。ローカル座標参照系は、ユーザーが定義するカスタムシステムです。任意の原点、方向、およびスケールが含まれます。メートル、フィート、または米国の測量フィートなどの既知の単位が定義されます。.
グローバル座標系は、点のインポートまたは計測時に定義されます。このステップでは、座標参照系は 「未定義」と。
ローカルポイントを追加する
新しい ポイントコレクション、ポイントの追加を開始できます。まずローカルポイントを追加し、次にグローバルポイントを測定してリンクします。新しいローカルポイントはインポートするか、手動で追加できます。ローカルポイントにリンクする際に、Pix4DでサポートされているRTKデバイスを使用してグローバルポイントを測定できます。ポイントが測定されると、コレクションの座標参照系が定義されます。

ローカルポイントは、.csvファイルを使用してインポートするか、既知のローカル座標を手動で入力してローカルポイントを定義することができます。.
ローカルポイントをインポート
- 6つの列: ポイントラベル、東座標、北座標、高さ、水平精度、垂直精度
- 4つの列: ポイントラベル、東座標、北座標、高さ
- タップする
 ボタン。.
ボタン。.

- を選択してください 「任意CRS」 。
- 選択してください 測定単位.
- メートル(m)
- 米国フィート(USft)
- 国際フィート(ft)

- 軸の方向を選択.
インポートした点の軸の向きを選択してください。ファイル構造を表す向きを選択してください。つまり、どの列に東座標と北座標が含まれているかを選択してください。.
ヒント: ヨーロッパ諸国は通常、東座標と北座標を使用しますが、北米では北座標の後に東座標を使用します。
- を選択してください 。
インポートされたポイントは ポイントコレクション。

新たにインポートされた各ローカルポイントには、以下のものが含まれています。
- ポイントラベル名。.
- 輸入タグと国内タグ。.
- 水平方向および垂直方向の精度(ファイルに含まれている場合)。.
- 測定単位と連動します。.
- 輸入日。.
- リンクされたアイコン - コレクション内にグローバルポイントがない場合、このアイコンはグレー表示されます。.
- 計測アイコン - PIX4D対応RTKデバイスでポイントを計測します。.
ローカルポイントがインポートされたので、グローバルポイントを追加できるようになりました。
ローカルポイントを定義する
ローカル座標が記載された.csvファイルがない場合でも、既知のローカル座標を手動で入力することで、ポイントコレクションにローカルポイントを追加できます。.
- から ポイント収集、 タップする
 ボタン。.
ボタン。.

- を選択してください 「ローカルポジション」 。
- 入力:
- ローカルポイント名(オプション)。
- 東座標、 北座標、および 高さ(楕円体)座標。
- 水平精度 および 垂直精度(オプション)。
- をタップします 「ローカル座標を保存」。

- 測定単位を選択してください(この選択肢は最初に入力されたポイントに適用され、コレクションに入力される以降のポイントの測定単位を定義します。)
- ローカルポジションの入力に成功しました。.
ポイントコレクションにローカルポイントが追加されたことで、グローバルポイントも追加してリンクできるようになりました。.
グローバルポイントを追加する
ポイントコレクションにローカルポイントが含まれている場合、PIX4D対応RTKデバイスを使用してグローバルポイントを計測したり、.csvファイルからインポートしてローカルポイントをグローバル参照点にリンクしたりすることが可能です。ローカルポイントとグローバルポイント間の変換は、両方の座標系で最低3つの既知のポイントがあれば計算できます。可能な限り、適切な分布と間隔でより多くのポイントを計測することをお勧めします。.
コレクションのグローバル座標参照系は、最初にインポートまたは測定されたグローバルポイントによって定義されます。以降のすべての測定は、この参照系で行う必要があります。.
グローバルポイントを測定する
- から ポイント収集グローバルに測定するローカルポイントを選択し、タップします。 計測アイコン
 .
.

- の グローバルポジション タブ(デフォルト)を選択してください。.

- 入力:
- グローバルポイント名(オプション)。
- アンテナ高さ/高度補正(オプション)レーザーを使用せずに測定する場合の入力値。
- 参考写真(任意)。
- 説明(任意)。
- 測定時間:30秒以上を推奨します。
- をタップします 「計測」。

測定が完了すると、その点はグローバル参照点とローカル参照点にリンクされます。最低3つのリンクされた点があれば、計算を実行できます。必要な精度範囲外の残差を持つリンクされた点を除外できるように、3つ以上のリンクされた点を使用することをお勧めします。.
ことが可能です サイトの位置を計算する。
グローバルポイントをインポート
グローバルポイントをインポートする方法は、ローカルポイントをインポートする方法と同じです。.
- 6つの列: ポイントラベル、東座標、北座標、高さ、水平精度、垂直精度
- 4つの列: ポイントラベル、東座標、北座標、高さ
より ポイントコレクション:
- ドロップダウンメニューを選択してください
 そしてタップします ファイルのインポート アイコン
そしてタップします ファイルのインポート アイコン .
.

- グローバルポイントを含む.csvファイルを選択してください。.

- を選択してください 「既知のCRS」 。
- インポートされた点の座標参照系を指定してください。.
- 軸の方向を選択.
インポートした点の軸の向きを選択してください。ファイル構造を表す向きを選択してください。つまり、東座標と北座標はどの列に格納されているかを選択してください。
- を押してください インポートボタン。
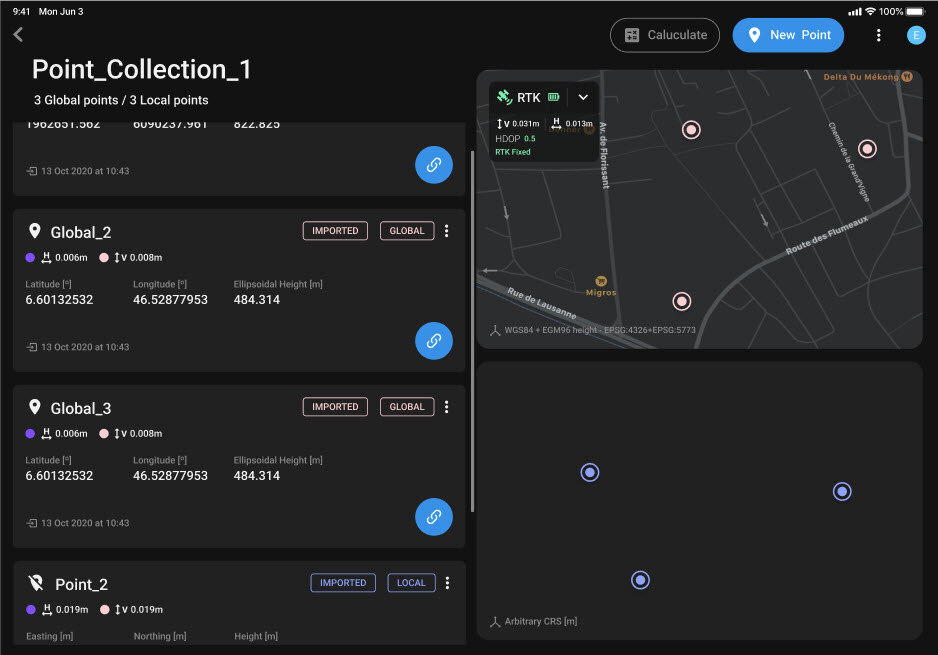
グローバルポイントは、それぞれのタグとともにポイントコレクションに保存され、マップ上に表示されます。サイト位置特定ポイントコレクションにグローバルポイントとローカルポイントが含まれると、2つのマップが表示されます。上のマップにはグローバルポイントが表示され、下のマップにはローカルポイントが表示されます。任意のポイントをクリックすると、ラベル名が表示されます。グローバルポイントとローカルポイントをリンクさせることで、サイトの位置特定を計算できます。.
リンクポイント
点群にローカル点とグローバル点が揃ったら、それらをリンクする準備が整います。3点以上がリンクされると、グローバル座標系とローカル座標系間の変換を計算できるようになります。必要な精度を超える残差を持つリンク点を除外できるように、3点以上をリンクすることをお勧めします。.
- コレクション内のグローバルおよびローカル参照を持つポイントを選択し、リンクをタップします。
 ボタン。.
ボタン。.
- グローバルポイントを選択すると、ローカルポイントの一覧が表示されます。グローバルポイントとリンクさせる適切なローカルポイントを選択してください。.
- ローカルポイントを選択すると、グローバルポイントの一覧が表示されます。ローカルポイントとリンクさせる適切なグローバルポイントを選択してください。.
一度ポイントがリンクされると、マップビュー上でリンクされたポイントは緑色に変わります。リンクボタンはリンク解除
 ボタンに置き換わります。
ボタンに置き換わります。 - 最低3つのポイントをリンクしてください。アラートが表示され、すぐに計算が開始されます。アラートはキャンセルして、さらに多くのポイントをリンクすることができます。.

コンピューティングサイトローカリゼーション
3つ以上のリンクされた点があれば、変換を計算することが可能です。外れ値が存在する可能性もあるため、3つ以上の点をリンクすることをお勧めします。追加の点がリンクされたら、変換を計算し、各点について計算された残差とRMSを確認してください。.

 をタップしてください 「計算」 。
をタップしてください 「計算」 。
残差
各点について、東西南北および高さ方向の残差が表示されます。残差は、点の基準となるローカル座標と、グローバル座標からローカル座標への変換に基づいて変換された座標から計算されます。.

外れ値を除去するには:
 外れ値とみなされる点を削除するには、トグルボタンをタップしてください。.
外れ値とみなされる点を削除するには、トグルボタンをタップしてください。. すべての外れ値をオフにした後、「再計算」をタップしてください。.
すべての外れ値をオフにした後、「再計算」をタップしてください。.- を選択してください 。
許容値設定を編集する:
残差の許容範囲をカスタマイズすることが可能です。.
 設定ボタンをタップしてください。.
設定ボタンをタップしてください。.- 希望する許容誤差設定を入力してください。(デフォルト値は、コレクションの測定単位で表示されます。)

- ポイント外れ値の値を入力してください。.
- RMS誤差値を入力してください。.
- 「完了」をタップしてください。.
RMS誤差の計算方法の詳細については、 「タイポイント誤差はどのように定義されますか - RMS」を参照してください。
計算されたサイト位置特定オプションと出力
計算されたサイト位置情報に基づいて、いくつかのオプションが利用可能です。.
WKTファイルのエクスポート
タップして  サイトのローカライズ用WKTファイルをエクスポートして保存し、ローカライズされたプロジェクトをローカルで処理できるようにします。
サイトのローカライズ用WKTファイルをエクスポートして保存し、ローカライズされたプロジェクトをローカルで処理できるようにします。
ドロップダウンメニューをタップしてください![]() その他のオプションについては、画面右上隅の
その他のオプションについては、画面右上隅の

 サイトのローカライズを編集する
サイトのローカライズを編集する
計算後でもコレクションを編集できます。この操作を行うと、以前の変換定義は消去されます。コレクションは計算前の状態に戻ります。追加ポイントの測定、インポート、リンク、リンク解除は以前と同様に行えます。.
 ローカライズされたファイルのエクスポート
ローカライズされたファイルのエクスポート
グローバルポイントとローカルポイントを含むzipファイルを、それぞれ別の.csvファイルとしてエクスポートし、さらに.wkt拡張子の変換ファイルもエクスポートしてください。.
 結果を見る
結果を見る
サイト位置特定のために得られた結果の概要:
- RMS誤差。.
- 各点および各軸ごとの残差。.
RMS誤差の計算方法の詳細については、 「タイポイント誤差はどのように定義されますか - RMS」を参照してください。
サイトローカライズされたプロジェクトを処理する
計算されたサイト位置特定ポイントコレクションを使用することで、プロジェクトを処理することが可能です。プロジェクトは、PIX4Dcloud / Pix4Dcloud Advancedにアップロードして処理することも、PIX4Dmaticにエクスポートして処理することもできます。.
PIX4Dcloud Starter / PIX4Dcloud Pro にローカライズされたプロジェクトをアップロードして処理します。.
PIX4Dcatchで計算されたサイトローカライズコレクションを使用すると、PIX4Dcloud Starter / PIX4Dcloud Proにアップロードする際に処理対象として選択できます。.

PIX4Dcloud Starter / PIX4Dcloud Pro にアップロードする際に、プロジェクトにサイト位置特定ポイントコレクションを割り当てるには:
 をタップします サイトローカライズの 矢印
をタップします サイトローカライズの 矢印 。
。- 適切なサイト位置特定ポイントのコレクションを選択してください。.

- をタップします アップロード。
詳細については、 「PIX4Dcloud でサイトローカライズプロジェクトを視覚化する方法」をご覧ください。
PIX4Dmatic Standard / PIX4Dmatic Pro を使用してローカルで処理
エクスポートされたプロジェクトとpoint_collection_name.wktファイルがあれば、サイトに合わせてローカライズされたプロジェクトをPIX4Dmaticにインポートして処理する準備が整います。.
- モバイルデバイスからプロジェクトをエクスポートします。このエクスポートには画像ファイルが含まれます。(LiDAR対応のAppleデバイスの場合は、DepthMap.tiffファイルとConfidence.tiffファイルも含まれます。)
- ドロップダウンメニューをタップしてください。.
- をタップします 「すべてのデータをエクスポート」。
- エクスポートして保存します。.
詳細については、 「PIX4Dcatch プロジェクトをエクスポートする方法 (iOS/Android)」を参照してください。
- ドロップダウンメニューをタップしてください。.
- タップ point_collection_name.wkt ファイルをエクスポートして保存します。.

- PIX4Dmaticを開きます。.
- 新しいプロジェクトを作成し、画像ファイル/フォルダをインポートします。.

- WKTファイルをインポートします。.

- をタップします
 で
で  。
。 - 選択 CRSファイルをインポートする .
- インポートするサイト固有のpoint_collection_name.wktファイルを選択してください。.
- タップ

- をタップします
- キャリブレーションしてください。.
WKTファイルが正常にインポートされると、PIX4Dmaticプロジェクトの ![]() 左下隅に、ローカライズされた点群名がプロジェクトの座標参照系として表示されます。プロジェクトは正常にサイトローカライズされ、必要に応じて処理できます。
左下隅に、ローカライズされた点群名がプロジェクトの座標参照系として表示されます。プロジェクトは正常にサイトローカライズされ、必要に応じて処理できます。