カメラリグとは、複数のカメラをリグで接続したシステムです。キャプチャと呼ばれるトリガーコマンドを1つ送信するだけで、リグに接続されたすべてのカメラが 同時に (撮影間隔は、画像読み出し時間(ミリ秒単位)よりもはるかに短い時間差です)。
異なるリグインスタンスに画像はどのように割り当てられるのですか?
Parrot SequoiaカメラとMicaSense RedEdgeカメラは、 PIX4Dmapper でカメラリグとして処理されます。Parrot SequoiaカメラとMicaSense RedEdgeカメラの両方で、キャプチャがトリガーされると、センサーごとに画像が撮影されます(Parrot SequoiaはG、R、RE、NIRの4つのセンサーを備えているため、1回のキャプチャで4つの画像が撮影されます。MicaSense RedEdgeはB、G、R、RE、NIRの5つのセンサーを備えているため、1回のキャプチャで5つの画像が撮影されます)。これらのキャプチャは、リグを正常にキャリブレーションするために、1つのリグインスタンスに割り当てられます。.
リグ割り当てアルゴリズムは、Parrot SequoiaまたはMicasense Rededgeカメラの画像EXIFから取得できる、各キャプチャに関連付けられた固有の識別子を使用して、キャプチャされた画像をグループ化し、それらをリグインスタンスに割り当てます。.
さらに、リグインスタンスごとに画像が欠落している場合、そのリグインスタンスは不完全と判断され、無効化されます。処理を続行するためには、不完全なキャプチャの許容量に制限があります。キャプチャ総数の5%以上が不完全な場合、処理は停止します。.
リグモデルのパラメータと処理オプションを編集するにはどうすればよいですか?
カメラリグのパラメータにアクセスします
カメラリグのパラメータにアクセスするには、以下の手順に従ってください。
1. メニューバーで、 [プロジェクト] > [イメージプロパティエディター...]をクリックします。 2. [選択したカメラモデル]セクションで、リグモデル名の横にある[編集...]
をクリックします。 3. [カメラリグモデルの編集] ウィンドウの、リグモデル名 の横にある[編集]をクリックします。
カメラリグのパラメーターを編集する
カメラリグモデルの編集 ウィンドウで編集できるさまざまなパラメータの説明は以下のとおりです。
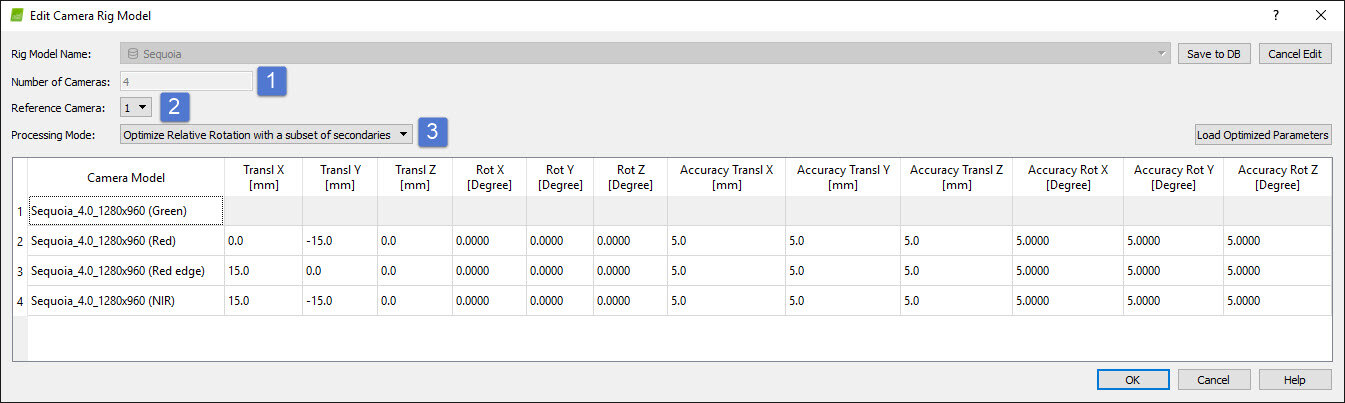
![]() リグに搭載できるカメラの台数は、リグのモデルによって固定されており、変更することはできません。.
リグに搭載できるカメラの台数は、リグのモデルによって固定されており、変更することはできません。.
![]() 基準カメラとは、他のカメラの位置関係を決定する基準となるカメラのことです。PIX4Dmapperでは PIX4Dmapperカメラの接続方法を記述するパラメータを持つことが、カメラリグのキャリブレーションを成功させる上で非常に重要です。これらのパラメータには、基準カメラに対する各カメラの空間位置( リグ相対位置。
基準カメラとは、他のカメラの位置関係を決定する基準となるカメラのことです。PIX4Dmapperでは PIX4Dmapperカメラの接続方法を記述するパラメータを持つことが、カメラリグのキャリブレーションを成功させる上で非常に重要です。これらのパラメータには、基準カメラに対する各カメラの空間位置( リグ相対位置。
- x、y、z軸に沿った移動量の差( [Edit Camera Rig Model ]ウィンドウの[Transl X]、[Transl Y]、[Transl Z] 列)
- 回転の差( 「カメラリグモデルの編集」ウィンドウの列「Rot X」、「Rot Y」、「Rot Z [度]」 )。
![]() 複数のリグ処理モードが利用可能です。
複数のリグ処理モードが利用可能です。

- 相対値に依存する: リグの相対値 (移動と回転) を固定したままにして、最適化/変更しない場合に使用します。
- 相対回転の最適化:すべてのカメラ間で一致するものを見つけ、それに応じて回転を最適化します(並進は固定されています)。
- サブセットのセカンダリを使用した相対回転の最適化:相対回転の最適化と同じですが、計算に使用するリグインスタンスの数を減らして処理時間を短縮します。これは、Pix4Dのカメラモデルデータベースにあるマルチスペクトルカメラに推奨されます。結果は相対回転の最適化と似ていますが、より高速です。
- 個別に最適化:これにより、例えば振動の場合など、リグインスタンスごとに異なる値を設定できます。これは、大型カメラを搭載したリグに適しています。
- リグを無効にする:リグの制約を無視してキャリブレーションを実行します。
- リグのキャリブレーション:リグの制約(並進と回転の両方)を取得するオプション。スケール設定のためにGCP(地上基準点)が必要です。