PIX4Dmapper 、ステップ 1. 初期処理中に、外部 (X、Y、Z、Omega、Phi、Kappa) および内部 (焦点距離、主点、放射状および接線方向の歪み) カメラ パラメータを計算します。Inpho でのカメラ歪みパラメータの定義は PIX4Dmapper 、これらの定義間の変換は不明であるため、歪みパラメータを 0 に設定するには、歪みのない画像を使用する必要があります。歪みのない画像を生成する方法の詳細については、 [メニュー] [処理] > [歪みのない画像を保存] を。
Inphoには、以下のパラメータとファイルをインポートできます。
- 歪みのない画像
- 外部カメラパラメータ
- 内部カメラパラメータ
歪みのない画像
歪みのない画像は、...\project_name\1_initial\images\undistorted_images にあります。.
内部カメラパラメータ
警告メッセージを避けるため、まずカメラの内部パラメータをインポートし、次に外部パラメータをインポートすることをお勧めします。.
内部カメラパラメータは、...\project_name\1_initial\params\project_name_calibrated_internal_camera_parameters.cam にあります。具体的には、主点の座標は、ファイル内の「 Principal Point Offset xpoff ypoff in mm (Inpho)」という説明の下に記載されています。

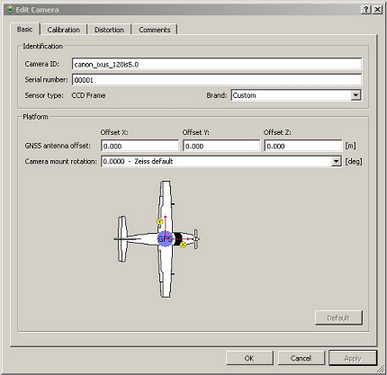
1. [カメラの編集] ダイアログの [基本] タブで、カメラの識別情報とプラットフォームを設定します。
2. [カメラの編集] ダイアログの [キャリブレーション] タブで:
- センサーシステムセクションで、 project_name_calibrated_internal_camera_parameters.camで取得した値を使用して、焦点距離、センサーサイズ、ピクセルサイズを設定します。
- 「主点」セクションで、 「画像座標系」を選択します。 「定義」では、 「PPA」のみを選択します。 「オートコリメーションの主点(PPA)」で、値を次のように設定します。
主点 [pix] px = -0.1820 (主点オフセット xpoff ypoff (Inpho)から取得) py = -0.0414 (主点オフセット xpoff ypoff (Inpho)から取得)
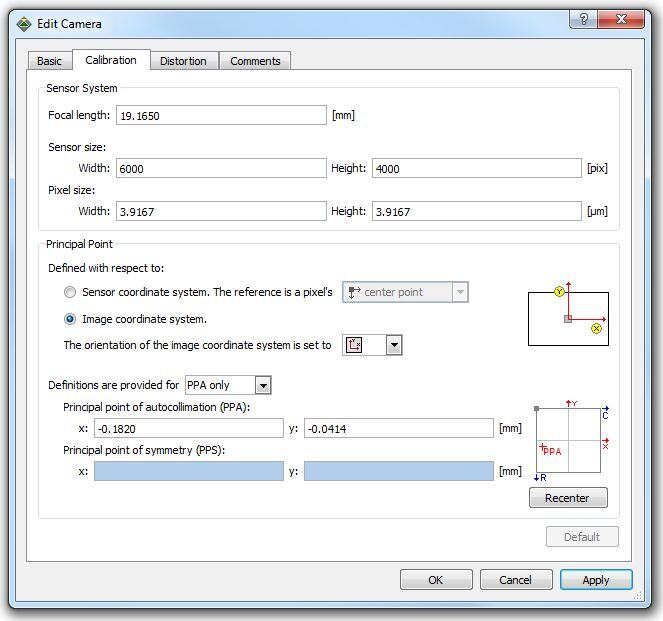
3. [カメラの編集]ダイアログの[歪み] タブで、 [補正を使用する]タイプを[なし/オフ] に設定します。歪みのない画像を使用するため、歪みは定義されません。

外部カメラパラメータ
外部カメラのパラメータ(X、Y、Z、Omega、Phi、Kappa)は、...\project_name\1_initial\params\project_name_calibrated_external_camera_parameters.txt に記載されています。.
外部カメラのパラメータを設定するには、このファイルを「写真フレーム」 ダイアログ(インポート→外部方向 )で使用します。

免責事項: 本情報は、お客様への参考として PIX4D が提供するものです。PIX4D は、本情報の正確性または有用性について、明示的または黙示的を問わず、いかなる保証も行いません。