アクセス方法: メニューバーで、 [プロジェクト] > [イメージプロパティエディター]ウィンドウ [イメージプロパティエディター] が表示されます。
PIX4Dmapperは、位置情報の有無にかかわらず画像を処理できます。.
少なくとも3枚の画像に位置情報が付与されている場合、  情報 「画像プロパティ エディター」セクションの 「画像位置情報」位置 「位置情報と向き」に緑色のチェックマークが表示されます。 が付与された画像の枚数も同セクションに表示されます。
情報 「画像プロパティ エディター」セクションの 「画像位置情報」位置 「位置情報と向き」に緑色のチェックマークが表示されます。 が付与された画像の枚数も同セクションに表示されます。

- GCPを追加します。詳細については、 ステップ1. プロジェクトを開始する前に > 4. フィールドまたは他のソースからGCPを取得する(オプションですが推奨)を参照してください。
- を設定します スケール と 。 詳細については、 「新しいスケール制約」、 「新しい方向制約」。
以下のことが可能です。
- 既にインポート済みの座標を削除します。.
- EXIFデータから画像の位置情報を読み込む。.
- 画像の位置情報と向きのファイルをインポートします。
画像位置情報ファイル形式の詳細については、 入力ファイルを参照して。
既にインポート済みの座標を削除します
セクションの 「画像位置情報」で 「位置情報と向き」、 「クリア」。
EXIFデータから画像の位置情報を読み込む
画像ファイルのEXIFデータに画像の位置情報が書き込まれている場合、PIX4Dmapperは画像をインポートする際に自動的にその位置情報を読み込みます。EXIFデータから画像の位置情報を再読み込みするには 「EXIFからセクションの 「画像の位置情報、 「位置情報と向き」。

一般的な画像位置情報ファイルから画像の位置情報と向きをインポートします。
-
画像位置情報ファイルが 「入力ファイル」。
-
で 画像位置情報 セクション 「位置情報と向き」をクリックします 「ファイルから...」

- ポップアップが 「位置情報ファイルを選択」という 表示されます。
- ドロップダウンリスト 「ファイル形式」、ファイルと選択した座標系(緯度、経度、高度、 または 経度、緯度、高度、 または X、Y、Z 、または Y、X、Z)に応じてファイル形式を選択します。これらのファイルの内容と形式の詳細については、 「入力ファイル」を。

- をクリックしてください ...
- ポップアップ 「位置情報ファイルを選択」、画像の位置情報ファイルに移動して選択し、「 開く」。
- されたら ポップアップ 「位置情報ファイルを選択」という、 「OK」。
画像の位置情報と向きの情報がインポートされました。.
注: PIX4Dmapperでの処理には、方位角は必要ありません。
ヒント: 一般的な画像位置情報ファイル形式であれば、複数のファイルを使用して画像の位置情報をインポートすることが可能です。
警告: 各画像には異なる位置情報が設定されている必要があります(つまり、同じ位置情報を持つ画像が複数存在することはできません)。
3D Robotics UAVから提供される飛行ログから画像の位置情報と向きをインポートする
-
セクションの 「画像位置情報」で 「位置情報と向き」、 「ファイルから...」

- ポップアップが 「位置情報ファイルを選択」という 表示されます。
- ポップアップ 「位置情報ファイルの選択」、 ドロップダウンリスト 「ファイル形式」を選択します 「3D Robotics Flight Log」。

- をクリックしてください ...
- ポップアップ 「位置情報ファイルを選択」、位置情報ファイルに移動して選択し、「 開く」。
- ポップアップが表示されたら 「位置情報ファイルを選択」という、 「OK」。
画像の位置情報と向きの情報がインポートされました。.
CropCam UAVsから提供されるフライトログから画像の位置情報をインポートする
-
セクションの 「画像位置情報」で 「位置情報と向き」、 「ファイルから...」

- ポップアップが 「位置情報ファイルを選択」という 表示されます。
- ポップアップ 「位置情報ファイルの選択」、 ドロップダウンリスト 「ファイル形式」を選択します 「CropCam Flight Log」。

- ウィンドウで 「位置情報ファイルの選択」ドロップダウンリストから 「カメラサーボ、カメラが取り付けられているサーボモーターを選択します(通常はServo8が使用されます)。
- (オプション) カメラトリガー値 (通常はデフォルト値の32256が使用されます)。この値は、画像が撮影される際にカメラサーボが取る値に対応します。
- をクリックしてください 「参照」。
- ポップアップウィンドウで 位置情報ファイルを選択してください位置情報ファイルに移動し、ファイルを選択してクリックします。 開ける.
ファイルを選択すると、以下の項目が自動的に入力されます。- 「最初の画像撮影日」は、 最初の画像が撮影された日時を示します。自動的に入力されますが、右側の矢印を使用して編集することもできます。
- 最初の位置情報取得日とは、最初のジオタグが付けられた日時を指します。この項目は自動的に入力されますが、右側の矢印を使って編集することもできます。
- 画像と位置情報のオフセット[ms]は、各画像に位置情報を正しく一致させるために、上記の値を使用して自動的に計算されます。
- ウィンドウで 「位置情報ファイルを選択」をクリックします 「OK」。
画像の位置情報と向きの情報がインポートされました。.
が提供するフライトログから画像の位置情報と向きをインポートします。 QuestUAV UAVs
-
セクションの 「画像位置情報」で 「位置情報と向き」、 「ファイルから...」

- ウィンドウ が 「位置情報ファイルを選択」 表示されます。
- で ポップアップ 「位置情報ファイルの選択」、 ドロップダウンリスト 「ファイル形式」を選択します 「QuestUAV Flight Log」。

- をクリックしてください 「参照」。
- ポップアップ 「位置情報ファイルを選択、位置情報ファイルに移動し、ファイルを選択して「 開く」。
- ポップアップが表示されたら 「位置情報ファイルを選択」という、 「OK」。
画像の位置情報と向きの情報がインポートされました。.
から提供されるフライトログから画像の位置情報と向きをインポートします。 Tetracam
-
セクションの 「画像位置情報」で 「位置情報と向き」、 「ファイルから...」
- ウィンドウ 「位置情報ファイルを選択」 が表示されます。
- 、 ポップアップ 「位置情報ファイルの選択」 で 「 から ファイル形式」 ドロップダウンリスト 「Tetracam Flight Log」。

- クリックしてください 「参照」。
- ポップアップ 「位置情報ファイルを選択、位置情報ファイルに移動し、ファイルを選択して「 開く」。
- ポップアップが表示されたら 「位置情報ファイルを選択」という、 「OK」。
画像の位置情報と向きの情報がインポートされます。.
画像の位置情報と向きをファイルにエクスポートします。
-
セクションの 「画像位置情報」で 「位置情報と向き」、 「ファイルから...」

- というポップアップが 「画像の位置情報をエクスポート」 表示されます。
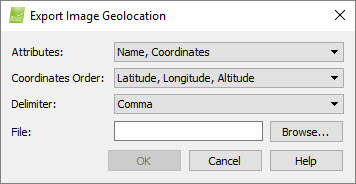
- ポップアップで 画像のエクスポート 位置情報ドロップダウンリストで 属性エクスポートされたファイルに含める、画像ごとの属性を選択してください。
- 座標。.
- 名前座標。.
- 名称、座標、方位、精度。.
- 窓に 画像のエクスポート 位置情報ドロップダウンリストで 座標 注文エクスポートされるファイルに含まれる座標の順序を選択してください。
- 緯度、経度、高度。.
- 経度、緯度、高度。.
- X、Y、Z。.
- Y、X、Z。.
- 窓に 画像のエクスポート 位置情報ドロップダウンリストで デリメーターエクスポートするファイルの区切り文字を選択してください。
- コンマ。.
- 空間。.
- タブ。.
- セミコロン。.
- をクリックしてください 「参照」。
- ポップアップ画面 「画像位置情報エクスポートファイルを選択」、ファイルの保存先パスを指定します。
- にファイル名を入力し ファイル名 、 「開く」。
- 「で ポップアップ 「 画像の位置情報エクスポートファイルを選択」をクリックします OK」。
画像位置情報ファイルはエクスポートされ、選択したパスに保存されます。.