PIX4Dtaggerは、画像内の特定のタグを自動的に検出し、手動タイポイント(MTP)または地上基準点(GCP)のマークを含む出力ファイルを生成できます。主な用途は以下のとおりです。
- カメラキャリブレーションワークフローの作成
- 屋内フォトグラメトリ
- オブジェクトモデリング
- 近距離/低高度マッピング(30メートル未満)
インストール
PIX4Dtagger は、 PIX4Dmapper バージョン 2.2 から 4.5.6 までの PIX4Dmapper ダウンロードできます こちらからと同じフォルダにあります PIX4Dmapper 実行ファイル (PIX4Dmapperをインストールした場所によって異なります PIX4Dmapper。たとえば、C:\Program Files\Pix4Dmapper のようになります。
タグ
PIX4Dtaggerは、 Chilitagsライブラリのタグのみをサポートしています。タグをダウンロードするには、こちらをクリックしてください。
これらの視覚マーカーは、データマトリックスの周囲に黒い枠線があり、そのデータマトリックスにはIDがエンコードされ、外側には白い枠線がある正方形のタグです。各タグには固有のIDがあり、プロジェクト内では一度だけ使用する必要があります。.
画像内のタグを最適に検出するには、タグは以下の条件を満たす必要があります。
- 固有のIDを設定してください。プロジェクト内で同じタグを二度使用しないでください。.
- 黒い枠線と同じか、それ以上の幅の白い枠線を設けてください。.
- 他の物体や環境によって遮られてはならない。.
- 画像のサイズは、50×50ピクセルから100×100ピクセル程度を推奨します。.
実際には、タグまでの距離が約10メートルであれば、A4サイズの用紙に安全に印刷できます。距離が約50メートルで、GoProなどのカメラを使用する場合、GSDは約1cmとなり、印刷サイズは1m×1mが推奨されます。Canon Ixusを100mの距離で飛行させる場合は、1.5m×1.5mの印刷面が必要になります。タグの印刷サイズは、カメラ、レンズ、画質によって異なります。.
タグは反射しない素材に印刷することをお勧めします。
タグの角は、Chilitagライブラリにおけるタグの元の位置に基づいて、時計回りに0から3まで番号が付けられます。
- コーナー0:左上(下の例示画像で赤で示されている部分)
- コーナー1:右上
- コーナー2:右下
- コーナー3:左下
PIX4Dtaggerは、タグが画像に写った際に向きが異なっていても、各コーナーの番号(元の位置によって定義される)を識別することができます。.

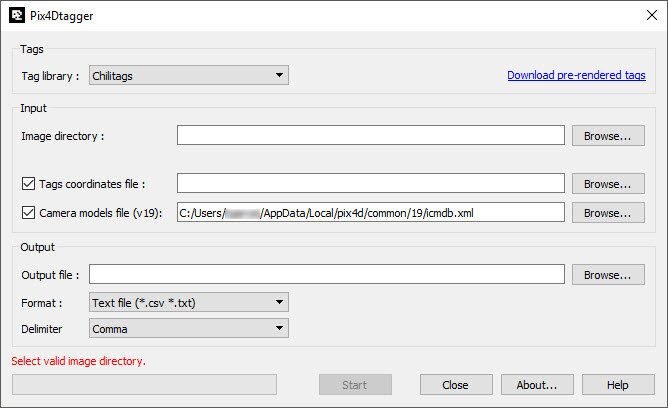
入力
指定可能な入力項目は以下のとおりです。
画像ディレクトリ:タグ付けする画像が格納されているフォルダへのパス。
タグ座標ファイル (オプション):このファイルでは、タグID、タグの角、およびその座標を定義できます。入力形式は2種類あります。
- ID、コーナー、x、y、z
例:
行目 1 はタグ番号 20、コーナー0、x=0.926565854516788、y=-0.898686213119904、z=2.0019203482441。 - tag_ID_corner,x,y,z
例:
行目は 1 、タグ番号 117、コーナー 0、x=0.0644895517734592、y=-0.155701025717433、z=2.00067879413364 を識別します。
どちらの場合も、
ID はダウンロードしたタグ ファイルに書き込まれた番号です。
ID はダウンロードしたタグ ファイルに「tag_」接頭辞付きで書き込まれた番号です。
corner はタグのコーナー番号 (0,1,2,3) です。
x、y、z は、その特定のタグのコーナーの座標で、現場で測定されます (スキャナ、トータル ステーション、測地 GPS、または以前の再構築を使用)。
複数のタグが識別された場合は、それぞれを別の行に記述する必要があります。
カメラモデルファイル(v19) (オプションですが推奨):画像の撮影に使用されたカメラモデルを知ることで、透視図法、魚眼レンズ、球面カメラのマークの精度が向上します。PIX4Dtaggerは、 PIX4Dmapper データベースのバージョン19以降に対応しています。次のパスにあるicmdb.XMLファイルを選択してください: C:\Users\Your Username\ AppData\Local\pix4d\common\19
出力
PIX4Dtaggerは、以下の出力ファイルを生成できます。
- テキストファイル(.csv、.txt):プロジェクト> GCP/MTP マネージャーにインポートできるマークを含むファイル PIX4Dmapper で。
- ビンゴファイル(.txt):プロジェクト> GCP/MTP マネージャーにインポートできるマークを含むファイル PIX4Dmapper で。
- PIX4Dプロジェクトファイル で開くことができるGCPまたはMTPを含む.p4dファイルを作成します PIX4Dmapper。 タグ座標ファイル と カメラモデルファイル(v19)、画像のジオロケーションと向きの初期推定値をエクスポートできることに注意してください。後者は、GPS情報がない場合、またはGPS情報の精度が低い場合に最も役立ちます。
ステータスバー
PIX4Dtaggerの下部には、タグ付けが開始されると、その状態(エラーメッセージ、または処理完了率)を示すステータスバーが表示されます。.
コマンドライン
PIX4Dtaggerはコマンドラインで使用できます。利用可能なオプションの詳細については、以下を参照してください。
- コマンドラインを開く
- 詳細については、次のコマンドを入力してください: pix4dtagger.exe -h
手動固定ポイント(MTP)
MTPを自動的に作成するためのワークフローの例を以下に示します。
- プロジェクト実施エリアにタグを配布してください。.
- 対象地域の画像を撮影してください。各タグが複数の画像に写っていることを確認してください。ディレクトリを作成し、その中に画像を保存してください。.
- PIX4Dtaggerを開きます。
- 「画像ディレクトリ」の横にある「参照...」 をクリックし、画像が保存されているディレクトリを選択します。
- (オプション) 「タグ座標ファイル」の横にある「参照...」をクリックし、プロジェクトで使用されたタグとそのコーナーが保存されている.csvファイルを選択します。
- (オプションですが推奨)カメラモデルファイルの横にある「参照...」 をクリックし、カメラデータベースを次の場所から選択します:C:\Users\Your Username\ AppData\Local\pix4d\common
- 「出力ファイル」の横にある「参照...」をクリックし、出力ファイルの名前と保存場所を選択します。
- フォーマット(テキストファイル、ビンゴファイル、p4dファイル)を選択してください。テキストファイルを選択した場合は、区切り文字(カンマ、セミコロン、タブ、スペース)を選択できます。
- 「開始」をクリックすると、自動タグ付けが実行され、選択した出力形式が作成されます。
地上基準点(GCP)
これは、GCP(地上基準点)を自動的にマークするためのワークフローの一例です。
- プロジェクト実施エリアにタグを配布してください。.
- タグのいくつかの角を測定します(スキャナー、トータルステーション、測地GPS、または以前の3D再構築データを使用します)。.
- 測定値を.csvファイルに書き込んでください。.
- 画像を取得します。各タグが複数の画像に表示されていることを確認してください。ディレクトリを作成し、その中に画像を保存します。.
- PIX4Dtaggerを開きます。
- 「画像ディレクトリ」の横にある「参照...」 をクリックし、画像が保存されているディレクトリを選択します。
- 「タグ座標ファイル」の横にある「参照...」をクリックし、手順3で定義したファイルを選択します。
- (オプションですが推奨)カメラモデルファイルの横にある「参照...」 をクリックし、カメラデータベースを次の場所から選択します:C:\Users\Your Username\ AppData\Local\pix4d\common
- 「出力ファイル」の横にある「参照...」をクリックし、出力ファイルの名前と保存場所を選択します。
- フォーマット(テキストファイル、ビンゴファイル、p4dファイル)を選択してください。テキストファイルを選択した場合は、区切り文字(カンマ、セミコロン、タブ、スペース)を選択できます。
- 「開始」をクリックすると、自動タグ付けが実行され、選択した出力形式が作成されます。
PIX4Dmapperの出力を使用する
PIX4Dtaggerによって生成された出力の使用方法は、出力フォーマットによって異なります。.
.p4d ファイルが生成された場合:
- PIX4Dmapperを開きます。
- 「プロジェクト」>「プロジェクトを開く」をクリック ..
- このプロジェクトでは、タイポイント(MTPまたはGCP)が画像に直接インポートされ、マークされています。.
テキストファイルまたはビンゴファイルが生成された場合。.
- PIX4Dmapperを開きます 。
- [プロジェクト] > [GCP/MTPマネージャー] > [GCPのインポート...]をクリックします。
- PIX4Dtaggerによって作成された.txtまたは.csvファイルを選択してください。.