カメラ内部のパラメータは、カメラのレンズとセンサーの形状、
つまり光がカメラのレンズをどのように通過してセンサーに到達するかを定義します。
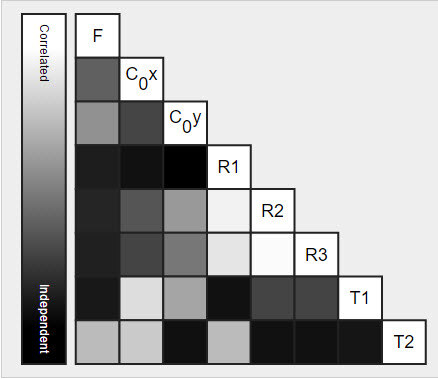
内部カメラパラメータ間の相関関係は、これらのパラメータが互いにどの程度関連しているか、つまり、あるパラメータの変化が他のパラメータにどのような影響を与えるかを示します。.
理想的には、内部パラメータは互いに独立しているべきであり、特に新しいカメラの内部方向を特徴付ける場合にはそれが重要です。しかし、パラメータ間に何らかの相関関係が存在することは想定内であり、場合によっては特定の種類の問題を検出するのに役立つこともあります。.
カメラパラメータ間の相関関係は、以下のようなプロジェクトで発生する可能性があります。
- 飛行高度に対して地形が平坦であること、GCPが同一平面上に配置されていること(高さの変動がないこと)、画像の端にATP/MTP/GCPが少ないこと、すべての画像が同じ向きで撮影されていることなど、均一なデータ。.
- 天底画像では、放射状歪みパラメータ間および2つの主点座標間に相関関係が生じる可能性がある。.
- 斜視画像では、焦点距離と主点の座標、および主点の座標と接線方向の歪みパラメータとの間に相関関係が生じる可能性がある。.
注: ほとんどのプロジェクトでは、R値はレンズを記述し、物理的な制約を受けるため、放射状歪みパラメータ(R1、R2、R3)間の相関関係が予想されます。
品質レポートでは、相関値は濃淡の異なる灰色で表されます。色が濃いほど、パラメータ間の相関は小さくなります。.
相関除去には以下の方法が有効です。
- 正確なカメラ位置情報(RTK、または少なくともGPS)とGCP(地上基準点)の組み合わせ。.
- 地形の深さの変化。.
- 斜めプロジェクトにおける複数の深度および画像端付近の MTP: 手動タイポイント (MTP) のインポートとマークの方法。
- カメラの向きを変える(例:グリッド行の端で回転させて、画像が180°になるようにする)。.
- 内部パラメータの最適化にすべての事前情報を使用する: メニュー プロセス > 処理オプション... > 1. 初期処理 > キャリブレーション。
主要パラメータ(焦点距離(F)と主点の座標(c0x、c0y))の相関が高い場合は、再構成に問題がある可能性があります。この場合、内部パラメータ最適化の [すべての事前] オプションを使用して最初の処理ステップを実行することをお勧めします。 メニュー [処理] > [処理オプション...] > [1. 初期処理] > [キャリブレーション]。