ライセンス: この記事は、 PIX4Dcloud Starter および PIX4Dcloud Pro ライセンス(旧PIX4Dcloud Advanced)
役割: のみです 所有者、管理者、編集者 PIX4Dcloudでデータセットを作成、処理、共有できるのは、
お知らせ: データセットがベストプラクティスを満たしていない場合、または下記で説明する機能を超える機能を必要とする場合、消費されたアローワンスまたはクレジットは返還されません。
この記事では
ベストプラクティス
- 復元したいプロジェクトエリアや対象物に応じて、ミッションを計画し、画像を撮影してください。.
- 適切な地上サンプリング距離で画像を撮影してください。.
- 詳細で鮮明、かつ十分なコントラストのある画像を撮影してください。.
- データセットに適した処理オプションを選択してください。.
- (オプション)GCP(地上基準点)を使用したり、RTKドローンで画像を撮影したりすることで、絶対精度を向上させることができます。.
機能
PIX4Dcloudのベストプラクティス
復元したいプロジェクトエリアや対象物に応じて、ミッションを計画し、画像を撮影してください。.
どのような用途においても、露出過多または露出不足の画像を撮影することは推奨されません。これらの画像は良好な結果を生み出すことができないためです。.
 |
 |
 |
| オリジナル画像 | 露出オーバーがひどい画像 | 露出不足の画像 |
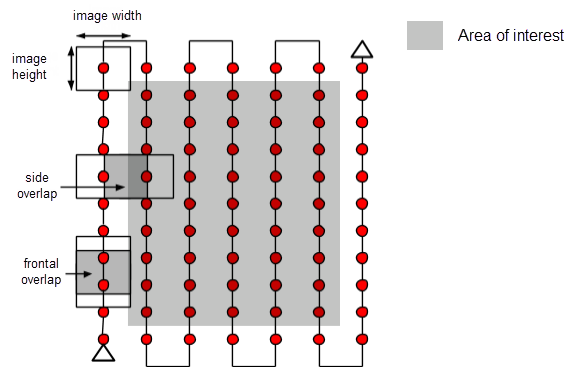
一般的なケース
少なくとも 75% (飛行方向に対して)が 側面オーバーラップ(飛行経路間)が少なくとも60% 。画像は規則的なグリッドパターンで撮影することをお勧めします(図1)。カメラは、 一定の高度 目標とする地上画素寸法(GSD)を確保するために、地形/対象物に対して
森林 と密生した植生
樹木や密集した植生は、その複雑な形状(無数の枝や葉)のため、重なり合う画像間で大きく異なって見えることがよくあります。そのため、画像間で共通の特徴点(キーポイント)を抽出することはより困難になります。良好な結果を得るには、 一般的なケースの セクションで説明したようなグリッド画像取得プランを使用し、以下の変更を適用することをお勧めします。
- 重なりを、 正面および側面で少なくとも85%まで増やしてください。
- 飛行高度を上げる:高度が高くなると、遠近法の歪みが少なくなり(そのため、見た目の問題も少なくなる)、密集した植生の視覚特性も向上します。つまり、このような領域では、重なり合う画像間の視覚的な類似性を検出しやすくなります。飛行高度、画像ピクセル解像度、焦点距離によって、画像の地上サンプリング距離(空間解像度)が決まります。10cm /ピクセルを超えるGSDで最良の結果が得られます。
農地が広がる平坦な地形
農地のように地形が平坦で視覚的な内容が均質な場合、画像間で共通の特徴点(キーポイント)を抽出するのは容易ではありません。良好な結果を得るためには、「 一般的なケース セクションで説明したようなグリッド画像取得計画を、以下の変更を加えて使用することをお勧めします。
- 重なりを、 正面および側面で少なくとも80%まで増やしてください。
- もっと高く飛べ。ほとんどの場合、高く飛べば結果は良くなる。
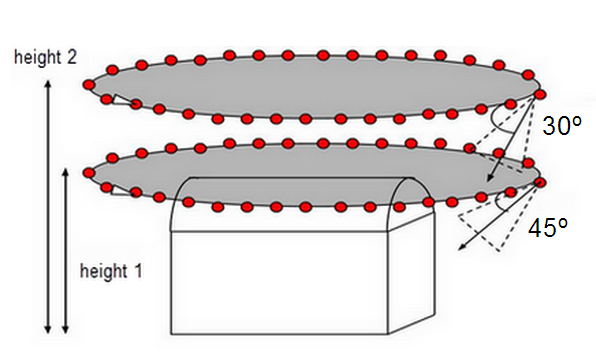
建物の 再建
3D建物の再構築には、特定の画像取得計画が必要です(図2)。
- カメラの角度を調整して、画像の大部分が再構築したい対象物で占められ、再構築したくない対象物は画像のごく一部を占めるようにしてください。すべてのミッションに適用できる単一のカメラ角度はありません。.
- 建物の周りを2周目、3周目と飛行し、周回するごとに飛行高度を上げ、カメラアングルを狭めてください。.
- 対象物の大きさや対象物までの距離にもよりますが、十分な重なりを確保するために、5~10度ごとに画像を撮影することをお勧めします。.
- 飛行高度は、飛行間隔で最大でも2倍までしか上げてはならない。高度が異なると、空間分解能も異なるためである。.
- PIX4Dcloudは、建物の斜め画像から高品質の点群を生成します。.
特別なケース
このセクションでは、雪、砂、湖など、地図作成が難しい地形に関するヒントをいくつか紹介します。.
雪や砂は、 広大で均一な領域であるため、視覚的な要素が少ない。したがって、次のようになる。
- を使用してください 。正面オーバーラップは少なくとも85%、側面オーバーラップは少なくとも70%です。
- を高めるために、露出設定を適切に調整してください 限りコントラスト 各画像で可能な
水面は 広大で均一な領域であるため、視覚的な要素はほとんどありません。水面や波面への太陽光の反射は、視覚的なマッチングには利用できません。
- 海洋を 元の状態に戻すことは不可能だ。
- などの水面を再現するために、陸地またはその他の静止物体が含まれている必要があります 河川 や 湖。より高い高度を飛行することで、より多くの陸地の特徴を捉えることができる場合があります。
回廊マッピング
鉄道、道路、河川などの回廊をマッピングするには、少なくとも 2 つの飛行ラインが必要です (図 3)。GCP は 必須ではありませんが、再構築の精度を向上させるために推奨されます。回廊マッピングにおける GCP の数と分布の詳細については、「 回廊マッピングにおける地上基準点 (GCP) の数と分布」を。
デュアルトラックの場合、正面オーバーラップ率を最低85%、側面オーバーラップ率を最低60%にすることをお勧めします。.
直下画像または斜め画像を使用できます。平坦な地形の場合は、直下画像の使用をお勧めします。.
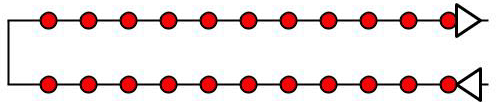
デュアルトラック画像取得計画が不可能な場合は、シングルトラック画像取得計画を使用できます(図4)。
- 重複率は十分高い:正面からの重複率は少なくとも85%。
- 地上基準点(GCP)は、飛行経路に沿ってジグザグ状に設定される。.

大型垂直物体の再構築
背が高く細長い物体の3D再構成には、特定の画像取得計画が必要です(図8)。
- 建造物の近くを飛行してください。.
- 構造物の周囲を、様々な高度で数回飛行してください。.
- 画像は高い重なり率で撮影する必要があります。同じ高さで撮影した画像間では90%、異なる高さで撮影した画像間では60%の重なり率が必要です。.
- 画像フレーム内のすべての被写体(プロジェクト領域外の背景にある被写体を含む)にピントが合っている必要があります。.
- 画像に位置情報を付加することを推奨します。.
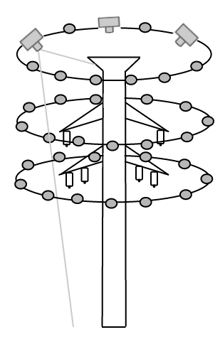
パワータワー
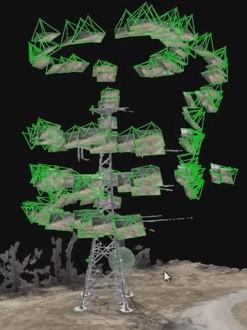
rayCloudで再構築されたパワータワー
適切な地上サンプリング距離で画像を撮影してください。.
この記事では、地上サンプリング距離(GSD)とは何か、そしてその計算方法について説明します。.
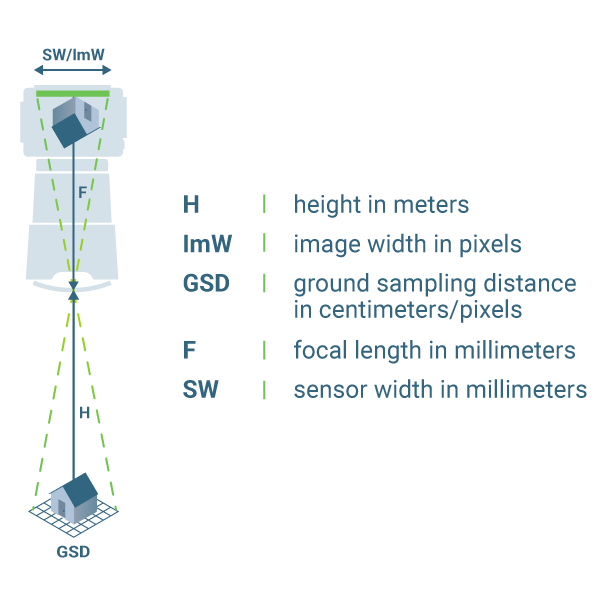
地上サンプリング距離(GSD)とは、 連続する2つのピクセル中心間の距離のこと 。画像のGSD値が大きいほど、画像の空間解像度は低くなり、細部が見づらくなります。
GSDは以下に基づいて計算されます。
- 飛行 高度 / 地形または物体からの距離 (H)。
- の カメラの仕様:
- 画像幅(ImW)。.
- センサー幅(SW)。.
- 焦点距離 (F)
- GSD計算のための自動ツール: ツール - GSD計算機。
- 希望する地上サンプリング距離とマッピングする地形を考慮して、カメラの焦点距離と飛行高度を選択する方法: 希望する地上サンプリング距離とマッピングする地形を考慮して、カメラの焦点距離と飛行高度を選択する方法。
- 異なる飛行高度で撮影された画像を処理できますか?: 異なる飛行高度/GSDで撮影された画像を処理する方法 。
プロジェクトの要件に合わせて飛行高度とカメラ仕様を調整するため、画像取得を開始する前にGSD値を決定することが重要です。例えば、対象エリアの詳細な再構築が必要な場合は、対象物に近づいて飛行する(GSD値を低くする)ことをお勧めします。一方、詳細な結果を必要としない広いエリアをカバーする場合は、より高い高度で飛行する(GSD値を高くする)ことで、取得時間とバッテリー消費量を大幅に削減できるだけでなく、処理時間も短縮できます。.
- GSDが5cmということは、画像内の1ピクセルが地面上で直線的に5cmを表すことを意味します(5×5=25平方センチメートル)。.
- GSDが30cmということは、画像内の1ピクセルが地上の直線距離で30cmを表すことを意味します(30×30=900平方センチメートル)。


詳細で鮮明、かつ十分なコントラストのある画像を撮影してください。.
詳細で鮮明、かつ十分なコントラストを備えた画像を撮影するためには、以下の点を考慮してください。.
カメラ設定
シャッタースピード、絞り、ISO感度は 自動。画像がぼやけていたり、ノイズが多い場合は、これらのパラメーターを手動で設定することをお勧めします。
シャッタースピード、絞り、ISO感度にはトレードオフの関係があります。画像処理においては、画像は鮮明でノイズが最小限に抑えられている必要があります。このような画像は、被写体が十分に明るく(散在する雲は避けるべきです)、カメラの設定が適切に調整されている場合に得られます。被写体が十分に明るくない場合、画像はノイズが多くなり、鮮明度が低下するため、結果の精度が低下します。.
- 経験則として、シャッタースピードは固定し、ISOはノイズのない低い値に設定し、絞りはシーンの明るさの変化に合わせて自動で調整するように設定する必要があります。このトレードオフが適切でない場合、露出オーバーまたは露出アンダーの画像が得られる可能性があります。
シャッタースピードは固定し、中速(目安:1/300秒から1/800秒)に設定する必要がありますが、画像がぼやけない程度に速くする必要があります。画像の5%以上が方向性のあるぼやけをしている場合は、シャッタースピードを少し上げる必要がある良い兆候です。ISOは
できるだけ低く設定する必要があります(最低100)。ISOを高く設定すると、一般的に画像にノイズが発生し、結果の品質が大幅に低下します。
絞りの最小値と最大値はレンズによって異なります。絞りが大きいほど、例えばf2.7のように小さな値になります(多くの光を取り込みます)。シャッタースピードとISOの両方を調整する場合は、絞り(f)を自動のままにしておく方が良いでしょう。 - 電子式および機械式の手ぶれ補正機能は、PIX4Dデスクトップソフトウェアのアルゴリズムに干渉するため、無効にする必要があります。.
- 推奨されるフォーカスモードは、無限遠でのマニュアルフォーカスです。このフォーカスモードを使用すれば、航空撮影プロジェクトでは常にピントの合った画像が得られます。地上撮影プロジェクトでは、焦点距離が長い場合、このモードではピントが合わない画像になる可能性があります。.
カメラの設定ミスや処理を妨げる不適切な機材などが原因で画像に問題が生じる場合:





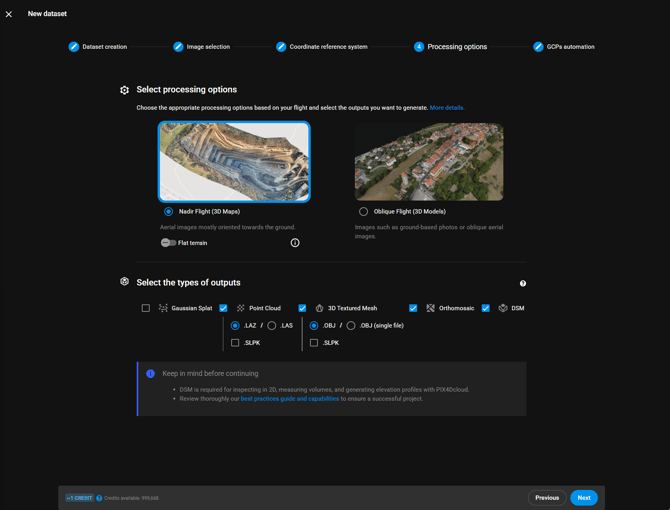
データセットに適した処理オプションを選択してください。.
PIX4Dcloudは、ユーザーが処理したいフライトの種類に応じて、さまざまな処理オプションを提供しています。推奨オプションは以下のとおりです。
| フライトの種類とデータセット | 推奨される処理オプション |
| 天底RGB画像 | 天底飛行(3Dマップ) |
| 斜め方向のRGB画像 | 斜め飛行(3Dモデル) |
| 地上RGB画像 | PIX4Dcatchからのアップロード |
| 360度画像 | サポートされていません |
| マルチスペクトル画像(*) | サポートされていません |
|
農地のRGB画像
|
平坦な地形のナディールフライト(3Dマップ) |
| 熱画像(**) | サポートされていません |
| 魚眼レンズ(***) | 完全にはサポートされていません |
(*) マルチスペクトル画像はサポートされていません。PIX4Dmapper または PIX4Dfields での処理をお勧めします。
(**) 熱 RJPG 画像はサポートされていません。熱 JPG グレースケール画像のみがサポートされていますが、放射測定エラー、スケールの問題、キャリブレーションの不正確さが発生する可能性があるため、お勧めしません。
(***) 魚眼カメラレンズの処理は可能ですが、ガウススプラット処理および仮想インスペクターツールとは互換性がありません。
- フライトの処理オプションを誤ると、予期せぬ結果を招く可能性があります。.
- PIX4Dcloudでは、360度パノラマ画像の処理はサポートされていません。.
- DJI Smart Obliqueを有効にして撮影したデータセットの処理は推奨されません。PIX4Dcloudでの処理を成功させるには、代わりに以下のミッションタイプを使用することをお勧めします。
- 従来の天底単一グリッド。または
- 斜めの画像を含む二重グリッド。または
- 軌道、円形、またはらせん
詳細については、 「新しいデータセット > 処理オプション - PIX4Dcloud」。
(オプション)GCP(地上基準点)を使用したり、RTKドローンで画像を撮影したりすることで、絶対精度を向上させることができます。.
PIX4Dcloudを使用した場合の最終結果(オルソモザイク、DSM、点群、およびDSM)の期待される絶対精度は、以下の要素に依存します。
画像の位置情報の精度
*ppm:百万分率(1kmあたり1mm)
- X、Y方向の精度 → 1 cm + 2 * (5 mm) = 1.1 cm
- Z軸方向の精度 → 2 cm + 2 * (5 mm) = 2.2 cm
詳細については、 「飛行カメラから測量ツールへ:RTK/PPKドローンのアップグレード」を参照してください。
GCPの使用
場合 地上基準点(GCP) 、標準的なドローンであっても、結果の絶対精度はGCPの絶対精度と同程度になります。例えば、GCPの精度が約2~3cmであれば、最終結果も同程度の絶対精度になると予想されます。
詳細情報: RTK、PPKドローン、GCP:どれがより良い結果をもたらすか?
PIX4Dcloud Proライセンスには AutoGCP機能、GCP(地上基準点)を使用して精度を向上させる 要件 この機能の使用
PIX4Dcloudの機能
PIX4Dcloudは、以下の要件が満たされている場合、GCPを自動的に検出できます。.
画像およびGCP要件
ためには AutoGCP検出 、画像とGCPに関して以下の要件を満たす必要があります。詳細情報とベストプラクティスについては、「 ターゲットの自動検出 - AutoGCPアルゴリズム」。
画像要件
- 画像品質は良好でなければなりません(ぼやけた画像やコントラストの低い画像では、アルゴリズムが失敗します)。.
- 画像はWGS84(EPSG:4326)で位置情報が付与されている必要があります。.
- 画像の位置情報の精度は、水平方向で5メートル以上、垂直方向で10メートル以上でなければならない。.
- 画像は真下、またはわずかに斜めの角度で撮影する必要があります。.
GCPの要件
- 正方形、対角線、およびエアロポイントのターゲットに対応しています。.
- 推奨サイズは、プロジェクトの平均GSDの最低20倍です。.
例: プロジェクトの平均GSDが2.5cm(1インチ)の場合、推奨されるターゲットサイズは50cm(20インチ)です。
- 白黒のターゲットに対応しています。状況によっては、他の色も使用できる場合があります。.
- GCP(地上基準点)は、互いに少なくとも10メートル離れて設置しなければならない。.
- GCP(地上基準点)は投影座標系を持つ必要がある。.

PIX4Dcloudは、処理を最適化するためのデフォルト設定オプションを提供します。.
- ナディールフライト(3Dマップ):高度に重複するグリッド飛行計画を使用して取得された、主に地上方向を向いた航空RGB画像に最適です。典型的な用途としては、採石場、地籍図などがあります。
- 斜め飛行(3Dモデル):斜め航空写真(フリーフライト)など、重なりが多いRGB画像に最適です。応用例としては、建物や物体の3Dモデル、検査などが挙げられます。
- 飛行条件が正しく、画像品質も十分であっても、デフォルトのパラメータ設定では誤った結果が生じる場合があります。.
- 処理オプションを変更する必要がある場合は、PIX4Dmaticなどの他のソフトウェアパッケージを代わりに使用できます。
PIX4Dcloudは再構成画像を生成および表示することはできますが、編集することはできません。.
PIX4Dcloudは、オルソフォト、デジタルサーフェスモデル、NDVIインデックス、点群、3Dメッシュなど、さまざまな出力を視覚化できるウェブベースのソフトウェアです。 これらの結果はPIX4Dcloud内で編集できないことに注意してください。
必要な編集作業には、PIX4DmaticやPIX4Dsurveyなどの代替製品のご利用をお勧めします。.
PIX4Dcloudは、一定サイズまでのデータセットを処理できます。.
PIX4Dcloudは、プロジェクトの特性、処理オプション、および要求された出力に応じて、一定数の画像を正常に処理できます。.
- PIX4Dcloudは最大4000枚の画像をサポートしていますが、すべてのケースで処理できるとは限りません。画像のサイズ、オーバーラップ、プロジェクトの形状、および生成する出力によっては、4000枚未満の画像でも処理が失敗する場合があります。これは、大型カメラ(42MP以上)を使用する場合や、オーバーラップが多いプロジェクト(斜め飛行など)の場合に特に当てはまります。詳細については、 こちらの記事を。
- PIX4Dcloudは、12時間以内の画像アップロードに対応しています。.
PIX4Dcloudは、一定のサイズまでの復元画像を表示できます。.
データセットは、アップロードされた結果のみで構成される場合があります。この場合、画像は処理されませんが、アップロードされたファイルはWeb上での表示と最適化のために処理されます。.
アップロードして結果として表示できる写真測量ファイルは以下のとおりです。
- オルソモザイク(.GeoTIFF)、
- DSM(.GeoTIFF)、
- インデックス(.GeoTIFF):NDVIマップまたはその他のインデックスマップ
- 点群(.las、.laz)、
- 3Dテクスチャメッシュ(.obj)。.
ファイルアップロードには、ファイルサイズとファイル形式に関していくつかの制限があります。
- オルソモザイク:単一のGeoTIFFファイルのみをサポート、最大50GB
- DSM: 単一のGeoTIFFファイルをサポート、最大50GB
- インデックス:単一のGeoTIFFファイルをサポート、最大50GB
- 点群:LASまたはLAZファイル1つのみサポート。.
- 3Dテクスチャメッシュ:OBJ+MTL+JPGファイルセット1つをサポート
- OBJ: 最大1GB。.
- JPG: 最大16k x 16k。.
PIX4Dcloudは処理にデフォルトパラメータを使用します。.
PIX4Dcloudは、写真測量の専門知識を必要としない、使いやすさを追求したウェブベースのソフトウェアです。様々な飛行シナリオに合わせて調整された一連のデフォルトパラメータを使用しており、これらのパラメータは変更できません。.