所定の正面重複率を達成するための画像撮影速度は、UAV/航空機の速度、GSD(地上画素寸法)、およびカメラの画素解像度によって決まります。.
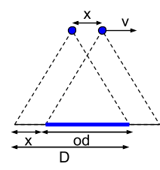
D = 飛行方向における1枚の画像が地上で移動した距離 [m]
重なり = 2つの画像間の望ましい正面重なりの割合
od = 飛行方向における2つの画像の重なり[m]
x = 飛行方向における2つのカメラ位置間の距離 [m]
v = 飛行速度 [m/s]
t = 2つの画像間の経過時間(画像レート)[秒]
図1から、以下の式が得られます。
od = オーバーラップ * D (1)
x = D - od (2)
t = x / v (3)
考えられるケースは2つあります。
カメラは、センサーの幅(長辺)が飛行方向に対して垂直になるように配置されている(通常の場合)。
D = Dh = (imH * GSD) / 100 (4)
どこ:
Dh = 1枚の画像が地面上で高さ方向に移動した距離(足跡の高さ)[m]
imH = 画像の高さ [ピクセル]
GSD = 目標GSD [cm/ピクセル]
式(1)と式(4)を組み合わせて式(2)とする。
x = Dh - オーバーラップ * Dh
x = Dh * (1 - オーバーラップ)
x = ((imH* GSD) / 100) * (1 - overlap) (5)
式(3)と式(5)を組み合わせると、次のようになる。
t = x / v = ((imH * GSD) / 100) * (1 - overlap) / v (6)
t = ((imH * GSD) / 100) * (1 - overlap) / v = ((4000 * 5 ) / 100) * (1 - 0.75) / 8.33 = 6 [s]
カメラは、センサーの幅(長辺)が飛行方向と平行になるように配置されている。
カメラが、センサーの幅(長辺)が飛行方向と平行になるように飛行機/UAVに搭載されている場合:
D = DW = (imW * GSD) / 100 (7)
どこ:
DW = 1枚の画像が地面上で幅方向に移動した距離(フットプリント幅)[m]
imW = 画像の幅 [ピクセル]
GSD = 目標GSD [cm/ピクセル]
式(1)と式(7)を組み合わせて式(2)を得る。
x = DW - オーバーラップ * DW
x = DW * (1 - オーバーラップ)
x = ((imW * GSD) / 100) * (1 - overlap) (8)
式(3)と式(8)を組み合わせると、次のようになる。
t = x / v = ((imW * GSD) / 100) * (1 - overlap) / v (9)