PIX4Dmapperの入力は以下のとおりです。
- 画像:PIX4mapperは画像処理に基づいています。
- 画像位置情報ファイル (オプション): 画像の位置情報を含むファイル。
- 地上基準点(GCP)ファイル (オプション): GCPの座標を含むファイル。
- 座標系ファイル (オプション):GCPの座標系または画像の位置情報を含むファイル。
- GCP/手動タイポイントマークファイル (オプション):画像上にマークされたGCPおよび手動タイポイントの画像座標を含むファイル。
- 点群 (オプション): LiDARなどの他のソースで取得した外部点群をPIX4Dmapperにインポートして、DSMとオルソモザイクを生成できます。
- 処理領域 (オプション): インポート可能な領域であり、出力が生成される領域を定義します。
- 放射測定校正画像 (オプション):放射測定校正ターゲットを示す画像
- 体積測定の頂点/領域 (オプション):インポート可能な頂点または表面(領域)で、体積測定を実行する領域を定義します。
- インデックス計算ツールにおける地域 (オプション):インデックスマップ、インデックス値、およびカラーインデックスマップが生成される特定の地域。
- 動画ファイル (オプション):動画ファイルをインポートして処理に使用できます(静止画像の代わりに)。
画像
PIX4Dmapperは画像処理ソフトウェアです。画像ファイルはJPEGまたはTIFF形式に対応しています。.
マルチバンドTIFF(RGB/赤外線/熱画像)、
1層(ピラミッド構造なし、複数ページなし)、
8、10、12、14、16ビット整数、浮動小数点
画像位置情報ファイル (オプション)
PIX4Dmapperは、位置情報の有無にかかわらず画像を処理できます。.
画像のEXIFデータに画像の位置情報が含まれている場合、PIX4DmapperはEXIFデータから位置情報を自動的に読み取るため、位置情報ファイルは不要です。EXIFデータに画像のGPS位置情報が含まれていない場合は、位置情報ファイルが必要です。カメラやGPSシステムから提供される位置情報ファイルは、PIX4Dmapperと互換性を持たせるために編集できます。PIX4Dmapperは、3D Robotics、CropCam、QuestUAVのUAVやTetracamのカメラから提供される位置情報ファイルも読み取ることができます。.
PIX4Dmapperにインポートできるファイルは以下のとおりです。
緯度、経度、高度
地理座標系WGS84(緯度、経度、高度)による画像位置情報です。ファイル形式は.csv、.txt、または.datです。1行に4列あり、文字はカンマで区切られます。.
ファイルの形式は以下の表に記載されています。
IMG_3165.JPG,46.2345612,6.5611445,539.931234
IMG_3166.JPG,46.2323423,6.5623423,529.823423
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
IMG_3165.JPG,46.2345612,6.5611445,539.931234,1.698,4.392,90.859
IMG_3166.JPG,46.2323423,6.5623423,529.823423,4.571,2.977,94.714
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
IMG_3165.JPG,46.2345612,6.5611445,539.931234,1.698,4.392,90.859,5,10
IMG_3166.JPG,46.2323423,6.5623423,529.823423,4.571,2.977,94.714,5,10
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
経度、緯度、高度
地理座標系WGS84(経度、緯度、高度)による画像位置情報です。ファイル形式は.csv、.txt、または.datです。1行に4列あり、文字はカンマで区切られます。.
ファイルの形式は以下の表に記載されています。
IMG_3165.JPG,46.2345612,6.5611445,539.931234
IMG_3166.JPG,46.2323423,6.5623423,529.823423
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
IMG_3165.JPG,46.2345612,6.5611445,539.931234,1.698,4.392,90.859
IMG_3166.JPG,46.2323423,6.5623423,529.823423,4.571,2.977,94.714
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
IMG_3165.JPG,46.2345612,6.5611445,539.931234,1.698,4.392,90.859,5,10
IMG_3166.JPG,46.2323423,6.5623423,529.823423,4.571,2.977,94.714,5,10
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
X、Y、Z
画像の位置座標は、任意の投影座標系(X、Y、Z)で指定されます。ファイル形式は.csv、.txt、または.datです。1行に4列あり、文字はカンマで区切られます。.
ファイルの形式は以下の表に記載されています。
システムの単位がメートルの場合、画像名、X/東方向[メートル]、Y/北方向[メートル]、Z[メートル]
画像名システムの単位がフィートの場合、
画像名、X/東座標[メートル]、Y/北座標[メートル]、Z[メートル]、オメガ[度]、ファイ[度]、カッパ[度] システムの単位がメートルの場合、
画像名、X/東方向座標[フィート]、Y/北方向座標[フィート]、Z[フィート]、オメガ[度]、ファイ[度]、カッパ[度] システムの単位がフィートの場合、
、画像名、X/東方向[メートル]、Y/北方向[メートル]、Z[メートル]、オメガ[度]、ファイ[度]、カッパ[度]、水平精度[メートル]、垂直精度[メートル] システムの単位がメートルの場合
画像名、X/東方向座標[フィート]、Y/北方向座標[フィート]、Z[フィート]、オメガ[度]、ファイ[度]、カッパ[度]、水平精度[フィート]、垂直精度[フィート] システムの単位がフィートの場合、
Y、X、Z
画像の位置座標は、任意の投影座標系(Y、X、Z)で指定されます。ファイル形式は.csv、.txt、または.datです。1行に4列あり、文字はカンマで区切られます。.
ファイルの形式は以下の表に記載されています。
システムの単位がメートルの場合、画像名、Y/北方向[メートル]、X/東方向[メートル]、Z[メートル]
画像の名称、Y/北座標 [フィート]、X/東座標 [フィート]、z座標[フィート](システムの単位がフィートの場合)
画像名、Y/北座標[メートル]、X/東座標[メートル]、Z[メートル]、オメガ[度]、ファイ[度]、カッパ[度] システムの単位がメートルの場合、
画像名、Y/北座標[フィート]、X/東座標[フィート]、Z[フィート]、オメガ[度]、ファイ[度]、カッパ[度] システムの単位がフィートの場合、
、imagename、Y/北方向[メートル]、X/東方向[メートル]、Z[メートル]、omega[度]、phi[度]、kappa[度]、水平精度[メートル]、垂直精度[メートル] システムの単位がメートルの場合
画像名、 Y/北座標[フィート]、X/東座標[フィート]、Z座標[フィート]、オメガ[度]、ファイ[度]、カッパ[度]、水平精度[フィート]、垂直精度[フィート] システムの単位がフィートの場合、
3Dロボティクス飛行記録
3D Robotics社のUAVが出力するGPSファイルはPIX4Dmapperと互換性があり、編集の必要はありません。.
クロップカムの飛行ログ
CropCamフライトログファイルは、CropCam搭載UAVが出力するGPSログファイルです。PIX4Dmapperと互換性があり、編集は不要です。.
フォーマットはASCII .txtファイルです。文字の区切りには空白文字を使用します。
カメラは通常Servo8に取り付けられます。
カメラトリガー値は、画像がトリガーされたときにカメラサーボが取る値に対応します。
最初の画像の日付は、最初の画像が撮影された日時に対応します。最初の画像の位置情報の日付は、最初の画像の位置情報が取得された日時に対応します。これらの2つの値は、最初の画像と最初の画像の位置情報の間のオフセットをミリ秒単位で計算し、各画像にジオタグを正しく一致させるために使用されます。
QuestUAVの飛行記録
QuestUAVが提供するファイルはPIX4Dmapperと互換性があり、編集の必要はありません。.
テトラカム飛行記録
TetracamのソフトウェアPixelWrench2でエクスポートされたファイルはPIX4Dmapperと互換性があり、編集は不要です。.
地上基準点(GCP)ファイル (オプション)
GCPとは、地図作成対象エリア内の座標が既知の地点のことである。.
GCPファイル形式は.csvまたは.txtファイル(ASCII形式)です。3D GCPの場合は1行あたり4列または6列、2D GCPの場合は1行あたり3列または5列で構成され、文字はカンマで区切られます。形式については、以下の表を参照してください。
ラベル、緯度[十進度]、経度[十進度]
GCP0,46.23456,6.56114
GCP1,46.23234,6.56234
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
ラベル、緯度[十進度]、経度[十進度]、精度X[メートル]、精度Y[メートル]
GCP0,46.23456,6.56114,5,10
GCP1,46.23234,6.56234,5,10
緯度は-90°から90°の間です。
経度は-180°から180°の間です。
システムの単位がフィートの場合は、ラベル、X/東方向[フィート]、Y/北方向[フィート]
システムの単位がメートルの場合、ラベル、X/東方向[メートル]、Y/北方向[メートル]、X精度[メートル]、Y精度[メートル] システムの単位がフィートの場合
、ラベル、X/東方向[フィート]、Y/北方向[フィート]、X精度[フィート]、Y精度[フィート] システムの単位がフィートの場合
ラベル、緯度[十進度]、経度[十進度]、高度[メートル]
GCP0,46.23456,6.56114,299.931
GCP1,46.23234,6.56234,299.823
緯度の値は-90°から90°の間です。
経度の値は-180°から180°の間です。
ラベル、緯度[十進度]、経度[十進度]、高度[メートル]、水平精度[メートル]、垂直精度[メートル]
GCP0,46.23456,6.56114,299.931,5,10
GCP1,46.23234,6.56234,299.823,5,10
緯度の値は-90°から90°の間です。
経度の値は-180°から180°の間です。
の単位がフィートの場合、ラベル、X/東方向[フィート]、Y/北方向[フィート]、z[フィート]
システムの単位がメートルの場合、ラベル、X/東方向 [メートル]、Y/北方向 [メートル]、z[メートル]、水平精度 [メートル]、垂直精度 [メートル] システムの単位がフィートの場合
、ラベル、X/東方向 [フィート]、Y/北方向 [フィート]、z[フィート]、水平精度 [フィート]、垂直精度 [フィート] システムの単位がフィートの場合
座標系ファイル (オプション)
座標系ファイルは、特定の座標系に関する情報を含む.prjファイルです。これはオプションです。.
.prj ファイルに含まれる情報は、以下を指定します。
- 地理座標系または地図投影法の名称
- 基準点
- 球状
- 本初子午線
- 使用単位
- 地図投影法を定義するために必要なパラメータ、例:
- 原産地の緯度
- スケールファクター
- 中央子午線
- 偽の北向き
- 東向きの誤った方向
- 標準的なパラレル
.prj座標系構文ファイルの取得または作成方法の詳細については、「 .prj座標系構文ファイルの取得または作成方法」を。
GEOGCS["GCS_North_American_1927",DATUM["D_North_American_1927",SPHEROID["Clarke_1866",
6378206.4,294.9786982],PRIMEM["Greenwich",0],UNIT["Degree",0.0174532925199433]]]
GCP / 手動タイポイント マークファイル (オプション)
GCP(地上基準点)/手動タイポイントは画像上にマークする必要があります。マーク後、画像座標を.txt、.csv、または.xmlファイル(GCP/手動タイポイントマークファイル)に保存できます。これにより、次回同じプロジェクトを実行する際(例えば、既存のプロジェクトに新しい画像を追加する場合)に、GCP/手動タイポイントを手動で再マークすることなく、同じGCP/手動タイポイントマークを使用できます。.
GCP/手動タイポイント画像座標ファイルは
座標系の原点は画像の左上隅です。その軸は下の画像に示すように配置されています。
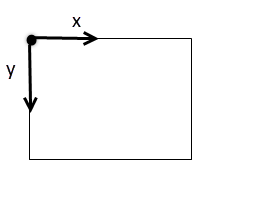
GCP画像の座標はピクセル単位で示されています。
画像名、 GCP/手動タイポイントラベル、 画像座標x、 画像座標y、(オプション)ズームレベル、 (オプション) 画像ディレクトリ
各画像は、画像名で始まり-99で終わるブロックで記述されます。画像名を含む行は、空白で区切られた2つの要素で構成されます。
画像名その他の文字列
画像ブロック内の他の行は、画像のGCP/手動タイポイントの位置を示しています。この行は、空白で区切られた3つの要素で構成されています。.
GCP/手動タイポイント名 GCP/手動タイポイント位置X GCP/手動タイポイント位置Y
GCP/Manual Tie Point_nameには、プロジェクトに既にインポート/作成済みのGCP/Manual Tie Pointの名前を指定する必要があります。GCP
/Manual Tie Point_positionXとGCP/Manual Tie Point_positionYは、画像上のGCP/Manual Tie Pointの座標です。
座標系の原点は画像の中心(Cx、Cy)(主点ではない)です。その軸は下図のように配置されています。

GCP画像の座標は、ミリメートル単位またはピクセル単位で指定できます。.
座標系の原点は画像の左上隅です。その軸は下の画像に示すように配置されています。
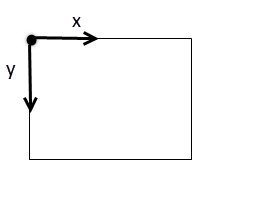
GCP画像の座標はピクセル単位で示されています。.
点群データ (オプション)
LiDAR技術などの外部ソースによって生成された点群は、PIX4DmapperでDSMおよびオルソモザイクを生成するために使用できます。このような点群を使用する場合、PIX4Dmapperによって生成された点群は、DSMおよびオルソモザイクの生成には考慮されません。.
処理エリア (オプション)
画像でカバーされる領域全体の出力を生成する必要がない場合は、処理領域を定義するファイルをインポートできます。処理領域の詳細については、 [メニュー] > [表示] > [rayCloud] > [左サイドバー] > [レイヤー] > [処理領域] を参照し。
ファイルには、PIX4Dmapperデータベースに登録されている任意の座標系を使用できます。.
放射測定校正画像 (オプション)
照明とセンサーの影響を考慮して画像の反射率を較正および補正する必要がある場合は、既知のアルベド値を持つ反射率ターゲットが表示されている画像をインポートできます。詳細については、[ メニュー プロセス] > [処理オプション...] > [3. DSM、オルソモザイク、インデックス] > [インデックス計算機。
体積測定 頂点数 / 面積
特定の領域の体積を定義する必要がある場合は、その領域またはその領域を定義する頂点を含む .shp ファイルをインポートできます。この .shp ファイルは、PIX4Dmapper または他のソフトウェア (GIS、CAD) で生成できます。PIX4Dmapper を使用して体積 .shp ファイルをエクスポートする方法の詳細については、「 体積のエクスポート方法」を。
指数計算機の適用範囲
インデックスマップ、インデックス値、およびカラーインデックスマップが生成される特定の領域を定義する必要がある場合は、領域を含む .shp ファイルをインポートできます。.
ビデオファイル
PIX4Dmapperはビデオフレームを処理できます。.
- 正確な地図作成のために動画を撮影することは推奨されません。動画で得られる結果の品質は、静止画で得られる結果に比べてほぼ常に劣ります。.
- GoPro 4やDJIなどのカメラで撮影した4K動画は、まずまずの画質を提供します。.
- フルHD動画では、通常、十分な結果を得るには不十分です。.
動画を処理に使用する方法の詳細については、「 動画を処理に使用する方法」を。