この記事では、ヨー角、ピッチ角、ロール角、オメガ角、ファイ角、カッパ角の定義、およびこれらの角度をPix4D製品で変換して使用する方法について説明します。.
2つの角度セットの主な違いは次のとおりです。
- の物体が、 航空機やドローンなど その航法座標系に対して回転する角度を表します。主にドローンメーカーによって使用されます。
- 間の回転を定義します 画像座標系 と投影座標系
この記事では
ヨー、ピッチ、ロールの定義
オメガ、ファイ、カッパの定義
ヨー、ピッチ、ロールをオメガ、ファイ、カッパに変換する方法
Pix4D でオメガ、ファイ、カッパとヨー、ピッチ、ロールの角度を使用する
ヨー、ピッチ、ロールの定義
ヨー角、ピッチ角、ロール角は、航法座標系と機体座標系の間の関係を定義します。座標系と回転は次のように定義されます。

例
カメラが下向きに取り付けられ、画像の上端が航空機の前方を向いていると仮定すると、ヨー角、ピッチ角、ロール角は次のように定義されます。
ヤウ
- ヨー角が0°で、カメラが地面(つまり天底)を向いている場合、画像の上端は北を指していることになります。.
- ヨー角が90°でカメラが天底を向いている場合、画像の上端は東を向いていることを意味します。.
- ヨー角が270°で、カメラが天底を向いている場合、画像の上端は西を向いていることを意味します。.
ピッチ
- ピッチが0°の場合、カメラは下向き(つまり天底)を向いていることを意味します。.
- ピッチが90°の場合、カメラは正面を向いていることを意味します。.
ロール
- ジンバルを使用する場合、この値は通常0°です。.
その他の例:
- ヨー=0°、ピッチ=0°、ロール=0°とは、カメラが天底(地面に対して垂直に下を向いている状態)にあり、画像の上端が北を向いていることを意味します。.
- ヨー=0°、ピッチ=90°、ロール=0°とは、カメラが航空機から前方、つまり北方向を向いていることを意味します。.
- ヨー=90°、ピッチ=0°、ロール=0°とは、カメラが天底(地面に対して垂直に下を向いている状態)にあり、画像の上端が東を向いていることを意味します。.
オメガ、ファイ、カッパの定義
オメガ、ファイ、カッパの角度は、(X、Y、Z)測地座標系を回転させて画像座標系に合わせるために使用される角度として定義されます。回転は次の順序で適用されます。
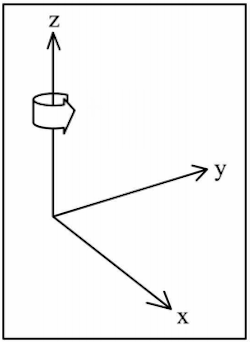
- カッパ(κ)は、Z軸を中心とした回転を表す。.
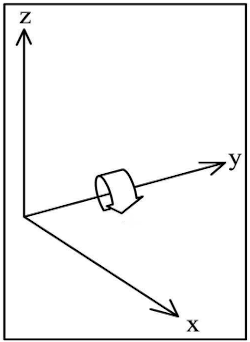
- ファイ(φ)は、Y軸を中心とした回転を表す。.
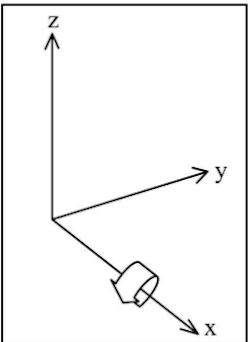
- オメガ(ω)は、X軸を中心とした回転を表す。
座標系の定義に関する詳細については、「 カメラの内部パラメータと外部パラメータはどのように定義されるのか?」の 記事を参照してください。
ヨー、ピッチ、ロールをオメガ、ファイ、カッパに変換する方法
ヨー、ピッチ、ロールからオメガ、ファイ、カッパへの変換を成功させるには、地球上のカメラの位置など、いくつかの要因が関係します。.
ヨー、ピッチ、ロールをオメガ、ファイ、カッパに変換する方法は数多くあります。Pix4Dの方法は添付資料に記載されています。
- ヨー、ピッチ、ロール、オメガ、ファイ、カッパの角度と変換 - Pix4D 補足資料、2021年 (150 KB)
- 内部カメラパラメータと外部カメラパラメータはどのように定義されますか?
- M. Bäumker および FJ Heimes、「 ハイブリッド慣性航法システムの位置および角度データを使用した画像およびスキャナデータの直接ジオレファレンシングのための新しい較正および計算方法」、OEEPE 統合センサ方位に関するワークショップ議事録、2002 年 (400 KB)
Pix4Dでオメガ、ファイ、カッパ、ヨー、ピッチ、ロールの角度を使用する
角度値をPix4Dにインポートする
ほとんどのドローンメーカーは、ヨー、ピッチ、ロールの角度値を画像のEXIFタグに直接書き込みます。EXIFタグが利用可能な場合、 Pix4D製品に画像をインポートする際に、値は自動的にオメガ、ファイ、カッパに変換されます。詳細については、 「xmp.cameraタグの仕様」を参照してください。
ヨー、ピッチ、ロールの定義はUAVメーカーによって異なる場合があるため、すべてのUAVについてオメガ、ファイ、カッパを正確に計算できることを保証することはできません。.
画像のEXIF情報に方向角度が記録されていない場合は、テキストファイルを使用して値をインポートできます。
- PIX4Dmapperではを使用して、オメガ、ファイ、カッパの角度をインポートできます 画像プロパティエディタの「ファイルから...」。詳細は「 入力ファイル」の 記事をご覧ください。
- PIX4Dmatic では、ヨー、ピッチ、ロールは、[ ファイル] - [画像の位置情報と向きをインポート...]。詳細については、 [画像の位置情報と向きのインポート形式 - PIX4Dmatic] を。
処理オプション
現時点では、方位角の使用に直接影響を与える処理オプションは、PIX4Dmapperでのみ選択可能です。.
正確な角度値を組み込むことで、処理時間を短縮し、より正確な結果を得ることができます。 正確な位置情報と方位の キャリブレーション方法を使用します。 メニュー プロセス > 処理オプション... > 1. 初期処理 > キャリブレーション - PIX4Dmapper。
詳細については、 高精度位置情報パイプライン (PIX4Dmapper)に関するFAQをご覧ください。
品質レポートに表示される分散(RMS)に基づいて、初期のオメガ、ファイ、カッパ値の精度をテストしたり、初期の向きとPIX4Dmapperによって計算された最適化された向きを比較したりすることが可能です。.
初期のオメガ、ファイ、カッパ値の精度をテストするには、 標準 または 代替の キャリブレーション方法を適用します。 メニュー プロセス > 処理オプション... > 1. 初期処理 > キャリブレーション - PIX4Dmapper。
中に最適化された向きを計算します 初期処理。