この記事では、カメラの内部および外部パラメータの背後にある数学モデルについて詳しく説明します。.
この記事では
1. カメラ外部パラメータ
2. 3Dから2Dへ:カメラ内部パラメータ
2.1 パースペクティブレンズ
2.1.1 歪みモデルなしのカメラ
2.1.2 歪みモデルありのカメラ
2.2 魚眼レンズ
3. カメラリグ外部パラメータ
外部カメラパラメータは画像ごとに異なります。それらは以下のとおりです。
- T = (Tx, Ty, Tz) は、世界座標系におけるカメラ投影中心の位置です。
- Rは 、角度ω、φ、κ(PATB規約)でカメラの向きを定義する回転行列です。

場合 X = (X, Y, Z) が世界座標系における 3D 点である X' = (X', Y', Z') は次のように表されます。
![]()

ピクセル座標(xu, yu歪みのない3D点投影モデルの

ここで、 f はピクセル単位の焦点距離、(cx, cy) はピクセル座標における主点です。

させて:
![]()
同質点とする。
![]()
光学中心からの2次元半径の二乗、R1、R2、R3 は半径方向の歪み係数、T1、T2は 接線方向の
における歪んだ均質点はhd、yhd)
次のように表されます。

ピクセル座標(xd, yd歪みモデルを用いた3D点投影の

ここで、 f はピクセル単位の焦点距離、(cx, cy) はピクセル座標における主点です。
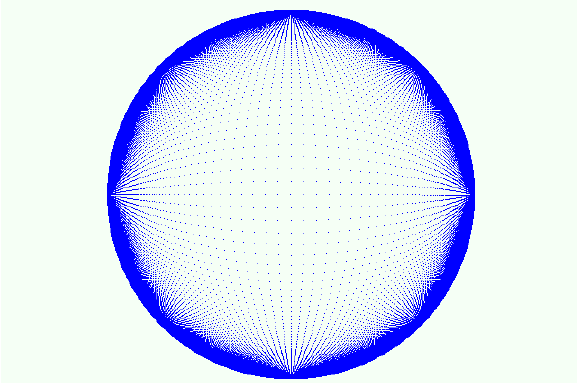
魚眼レンズの歪みは次のように定義されます。
- パラメータ C、D、E、F は、
ピクセル座標における円形画像のアフィン変形を表します。
アフィン行列の対角要素は焦点距離 f。
非対角要素は投影された画像円の歪みに関連しており、
最も一般的な場合は回転した楕円になります。
- 係数 p2、 p3、 p4 多項式の

ここで、
ピクセル座標(xd, yd魚眼レンズ歪みモデルを用いた3D点投影の
次のように表される。
![]()
どこ:

そして、(cx、cy)はピクセル座標における主点です。
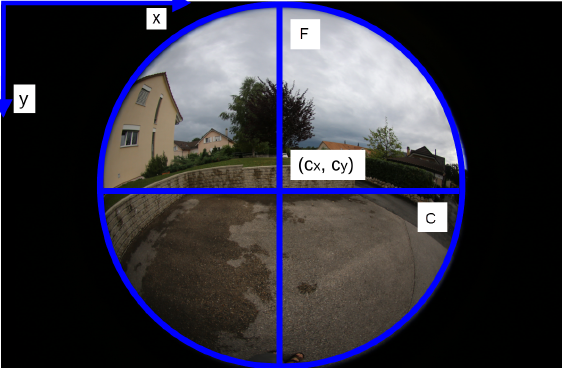
画像サイズが5472 x 3648ピクセル(図3)のCanon 6Dカメラに8mm Sigmaレンズを使用する場合、内部パラメータは次のように初期化できます。
- (cx, cy) = ( 5472/2, 3648/2 ) ピクセルは投影画像円の中心です
- p2 = p3 = p4 = 0
- p1 = 1
- C = F = 1780ピクセルは画像円の半径です
- E = D = 0
カメラリグは、幾何学的制約によって接続された複数のカメラで構成されます。カメラリグには以下の特徴があります。
- 1台のカメラを基準(マスター)カメラとし、ワールド座標系における位置 Tmと向き Rmを 。
- 他のカメラはすべて補助カメラであり、位置は T世界 、向きは Rで 座標系で
- 相対的な並進 Trel と回転 Rrelが 基準カメラに対する
補助リグカメラの位置と向きは、基準(マスター)カメラに対して次のように定義されます。
![]()
位置 X' 基準(マスター)カメラ座標系における3D点の
![]()
位置 X' 二次カメラの座標系における3D点の
![]()
カメラ座標系における3D点が計算されると、投影は第2節で説明した他のカメラの場合と同様に機能します。.