IMAGINEフォトグラメトリ(旧LPS)ソフトウェアは、ERDAS IMAGINEリボンインターフェースに緊密に統合されています。以下の手順に従うことで、Pix4Dmapperの出力(カメラパラメータと最適化された位置)をIMAGINEフォトグラメトリで使用できます。
1. 処理手順 1. 初期処理。
2. ファイルを開きます ( /projectname/1_initial/params にあります)。
- projectname_calibrated_external_camera_parameters.txt
- projectname_calibrated_internal_camera_parameters.cam
3. 平均飛行高度、x方向のピクセルサイズ、y方向のピクセルサイズを以下のように計算します。
- 平均飛行高度とは、撮影時のカメラの位置と平均地上高との間の距離です。
平均飛行高度 = 平均画像高さ - 平均地上高 - x方向のピクセルサイズ = (センサー幅 x 1000) / 画像幅 (マイクロメートル)。.
- y方向のピクセルサイズ=(センサーの高さ×1000)/画像の高さ(マイクロメートル)。.
- 通常、x方向のピクセルサイズはy方向のピクセルサイズと等しくなります。.
- 平均飛行高度 = 3633 - 3033 = 600m
- x方向のピクセルサイズ = (22.3012000 x 1000) / 4272 = 5.22
- y方向のピクセルサイズ = (14.8675 x 1000) / 2848 = 5.22
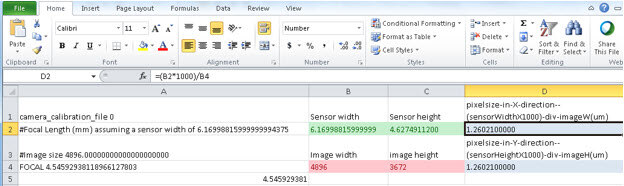
4. 次の図のようなExcelファイルを作成し、IMAGINEと互換性があるようにファイルを調整します。

5. ERDAS IMAGINEインターフェースから、 [ファイル] | [新規] | [写真測量プロジェクト] が開きます [新規ブロックファイル (プロジェクト)の作成]ウィンドウ
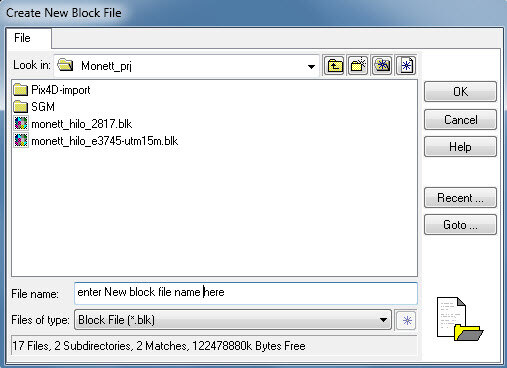
6. 書き込み権限のあるフォルダに移動します。 [ファイル名] ブロック ファイルの名前を入力し、 [OK]。
が開きます モデル設定 。ここでは、画像に関連付けられているカメラの種類に対応する幾何学的モデルを選択できます。 [デジタル カメラ] で [幾何学的モデル] 。
8. [OK] を閉じます [モデル設定] 。
9. [ ブロックプロパティ設定] ダイアログボックスが開きます。
10. 「設定」を で 水平参照座標系 、Pix4Dmapperによって生成された品質レポートファイルから適切な座標系を選択します。UTMは直交座標系であるため、最も適しているようです。UTM EPSGゾーンは簡単なインターネット検索で見つけることができ、それを 投影セレクター、EPSGゾーンに関連するその他の詳細が自動的に定義されます。
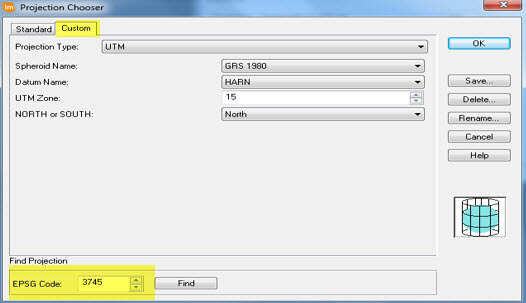
11. EPSGゾーンが不明な場合は、 [標準] の [投影法選択] 。
12. [カテゴリ ]ドロップダウンリストと座標系をクリックします。このプロジェクトでは、UTM Zone 15 GRS 1980 NAD83 North (EPSGコード3745)を選択します。
13. [OK]をクリックして[投影法選択]ダイアログボックスを閉じます。
14. [OK]をクリックした後、[ブロックプロパティ設定]ダイアログで水平単位が正しいことを確認します(このプロジェクトではメートル)。
15. [次へ] で [ブロックプロパティ設定] 。 [フレーム固有情報の ]セクションが表示されます。
16. 上記で計算した平均飛行高度(メートル)の値を入力し、 Enter キー。
飛行高度は、焦点距離に画像スケールを乗算することによっても計算できます。Enter キー。
17. [OK] を閉じます [ブロックプロパティ設定] 。
18. リボンインターフェイスが表示されます。
19. [画像を追加] アイコン(左上隅)をクリックして、プロジェクトに画像を追加します。[ 画像ファイル名] ダイアログが開きます。
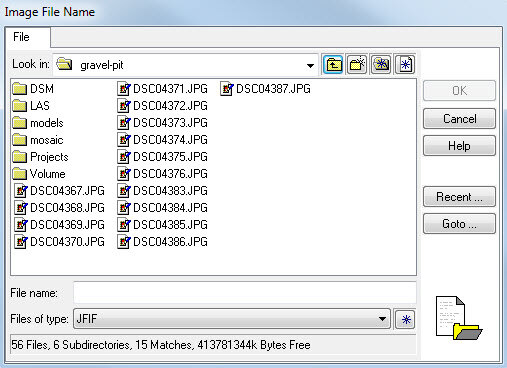
20. フォルダーを移動し、最初のファイルを選択します。
を押しながら Shift 、リストの最後のファイルを選択します。
22. [OK] 閉じます [画像ファイル名] 。 下部の [PYR 属性] 列が緑色でない場合は、ピラミッド レイヤーを計算します。これを行うには、属性テーブルの赤い PYR ボックスのいずれかをクリックします。 [ピラミッド レイヤーの計算] ダイアログが開きます。
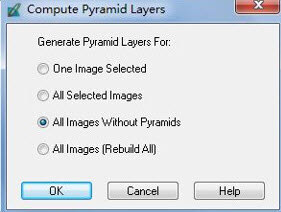
23. [ピラミッドレイヤーの計算] ダイアログで、 [ピラミッドなしのすべての画像 ]ラジオボタンが選択されていることを確認します。 [OK] で [ピラミッドレイヤーの計算] 。
24. 内部方向] 上部のツールバーにある [デジタルカメラフレームエディタ] ダイアログが開きます。
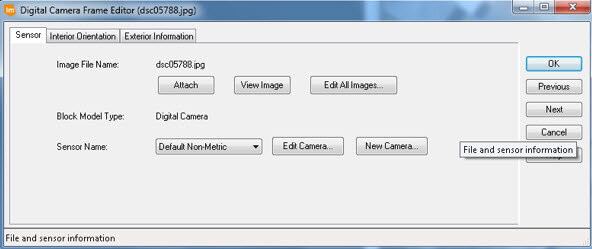
25. 「センサー名」 セクションで、 「新しいカメラ」 ボタンをクリックします。「 カメラ情報」 ダイアログが開きます。
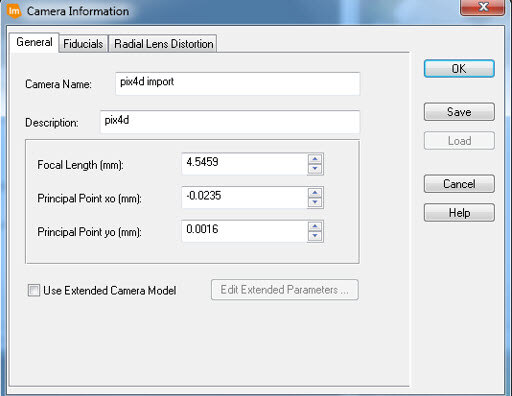
にカメラモデルを入力します カメラ名 。
27. Pix4Dmapper カメラパラメータにある焦点距離 (mm) を入力します。
28. Pix4Dmapper カメラパラメータにある主点 x0 (mm) を入力します。
29. Pix4Dmapper カメラパラメータにある主点 y0 (mm) を入力します。
をクリックして [OK] を閉じます [カメラ情報] 。
31. [内部方向] の [デジタルカメラフレームエディタ] 。
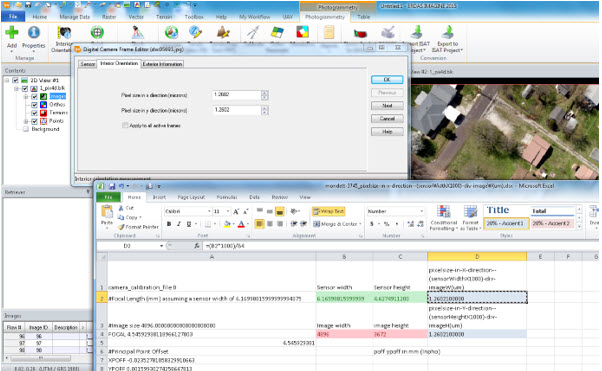
32. 先ほど計算したx方向のピクセルサイズ(マイクロメートル)を入力します。
33. 先ほど計算したy方向のピクセルサイズ(マイクロメートル)を入力します。
34. [すべてのアクティブなフレームに適用] ボックスをオンにします。
35. [外部情報] で フレームカメラフレームエディタ] 。
36. [すべての画像を編集 で [フレームカメラフレームエディタ] 。 [基準方向 と外部方向パラメータエディタ] が 開きます。
37. 先ほど作成した Excel ファイル (手順 4) から外部情報をコピーします。 [X0] をクリックし、マウスを Kappa までドラッグします。 [Kappa] ドロップダウン リストをクリックし、 [編集] をクリックします [貼り付け]
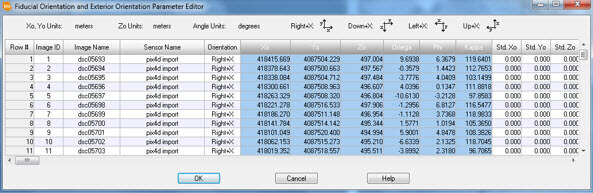
38. [OK] を閉じます [基準方向 および外部方向パラメータ エディタ]。
39. [設定ステータス] に設定されている [固定]。
をオンにします すべてのアクティブなフレームにステータスを適用する 。
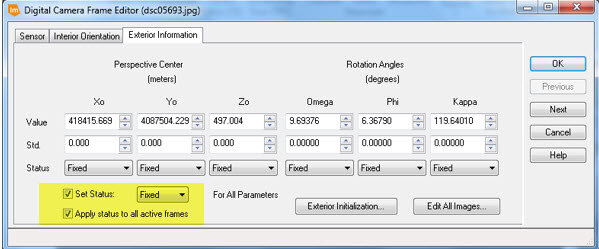
41. [OK] を閉じます デジタルカメラフレームエディター 。
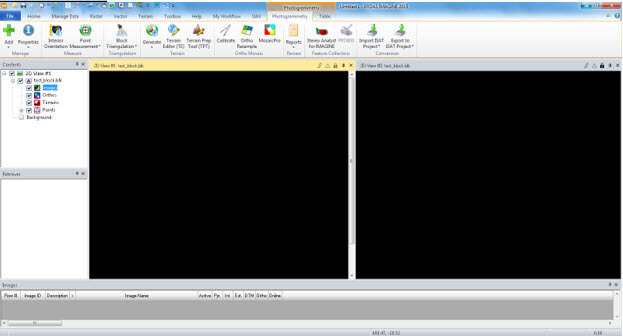
内部方位処理が完了すると、ブロックファイルの概要画像が上記のように表示されます。このプロジェクトは、DEM抽出、ステレオ表示、3D特徴収集、およびデジタルライングラフ(DLG)の生成に使用できます。.

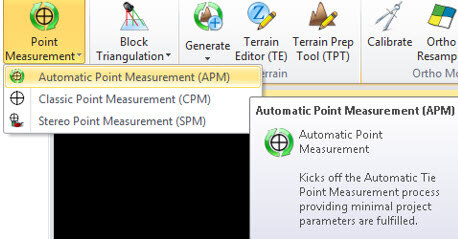
自動タイポイント収集を実行する
これにより、ソリューションの精度が向上し、制御点の自動検出がはるかに容易かつ正確になります。.
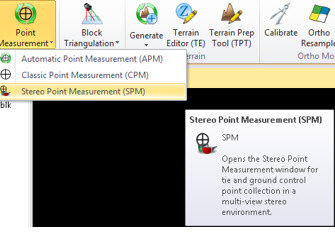
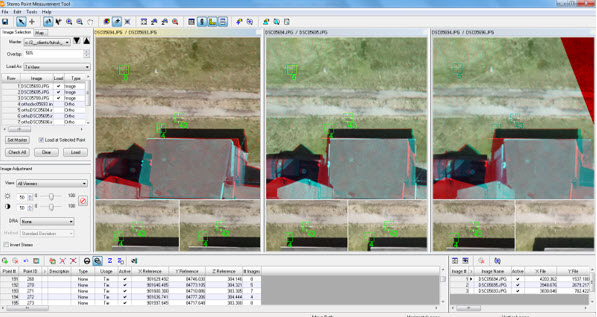
ステレオコントロールポイント測定
プロジェクトが完成すれば、SPMインターフェースを使用して、特に多数のUAV画像が重なり合う場合などに、特徴点への自動ドライブやポイントの自動位置特定などの制御データを収集できます。ステレオ環境での精度向上により、地上作業が軽減されます。.
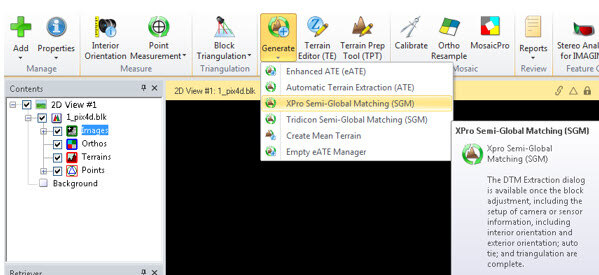
DSM、TIN、SGM点群の生成と編集
標高抽出には、疎なサーフェスモデルから高密度のSGMポイントクラウドまで、さまざまなオプションがあります。IMAGINE Photogrammetryのメインツールバーにある「生成」アイコンから、地形抽出オプションのいずれかを選択できます。.
多くの地図作成プロジェクトでは、等高線が地形を必要な精度で表現できるように、地形ブレークラインが必要となります。これは、IMAGINE Photogrammetry Terrain Editor および ArcGIS 用 ERDAS Terrain Editor でも実行できます。.
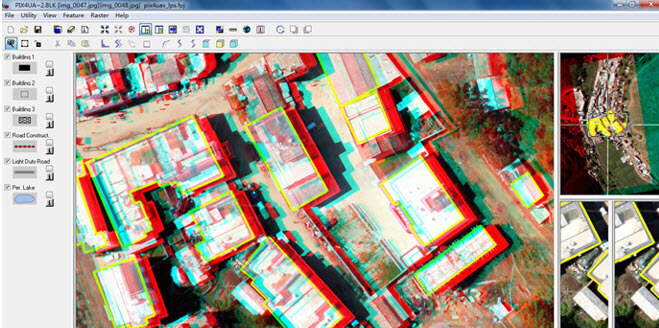
立体視と3D機能コレクション
このステレオ画像blkプロジェクトから3Dフィーチャ収集を実行することが可能です。フィーチャ収集は、Stereo Analyst for IMAGINE(SAFI)またはStereo Analyst for ArcGISで行うことができ、インターフェースは以下に示すものと同様になります(SAFI)。
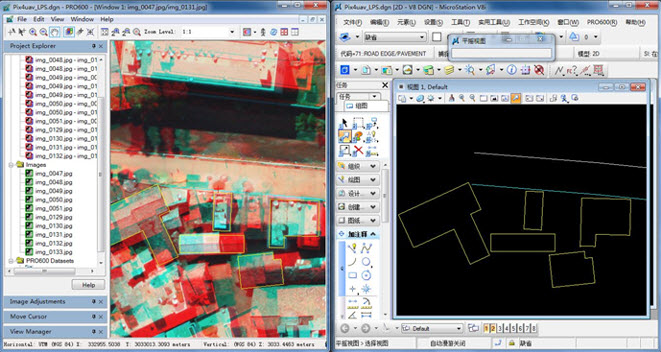
デジタル線グラフ(DLG)
Microstation環境でPro600と動的にリンクすることで、DLGの表示と編集が可能になります。同期されたインターフェースは、以下の図のようになります。
免責事項:Pix4Dは、お客様への便宜を図る目的でこの情報を提供しています。Pix4Dは、コンテンツの有効性または正確性に関して、明示的または黙示的を問わず、いかなる保証も行いません。.