この記事では、PIX4Dmapperデータベース内のカメラモデルを編集する方法について説明します。.
この記事では
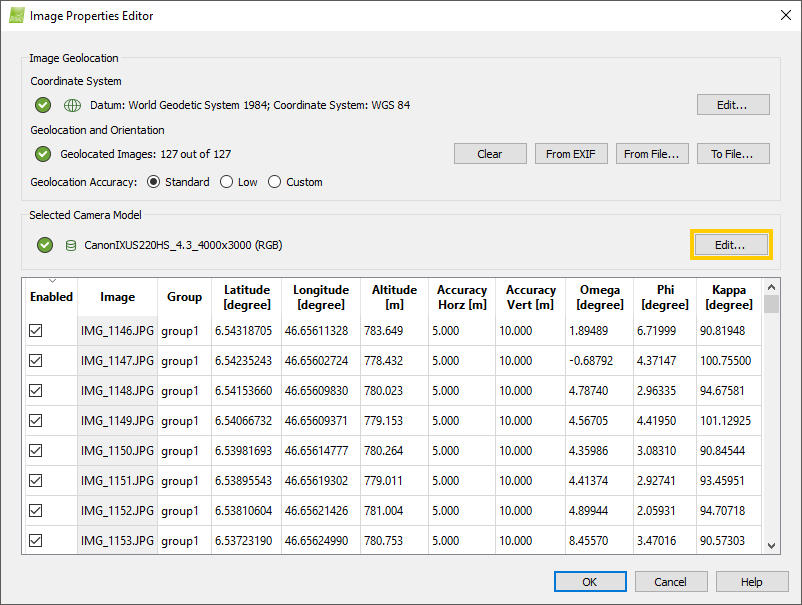
画像プロパティエディター
カメラモデルを編集するには、まず イメージプロパティエディタ。これは以下のいずれかの方法でアクセスできます。
- メインメニューで、 [プロジェクト] > [画像プロパティエディター]を選択します。
- メインメニューのカメラアイコンをクリックします。.

- 新規プロジェクトウィザードで新規プロジェクトを作成する際、画像の読み込み後に「画像プロパティ」ウィンドウが表示されます。.
画像プロパティエディタを開いたら、 「編集」をクリックします...
カメラモデルを編集する方法:
 編集済みのカメラモデルを
編集済みのカメラモデルを  データベースのカメラモデル
データベースのカメラモデル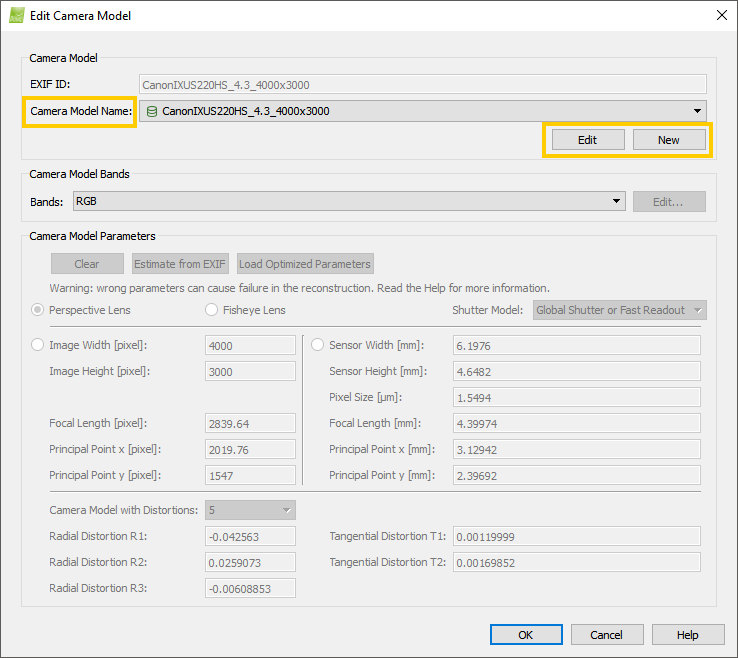
カメラモデルを別の既存のカメラモデルに変更するには:
セクションで 「カメラモデル」、「 カメラモデル名」 ドロップダウンリストをクリックします。
2. 右側のスクロールバーを使用して、利用可能なさまざまなカメラモデルを移動し、目的のカメラモデルをクリックします。
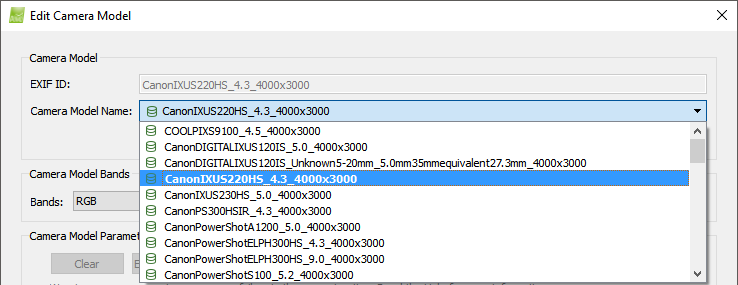
セクションで 「カメラモデルパラメータ」、選択したカメラに設定されているカメラ内部パラメータを確認します。内部カメラパラメータが使用しているカメラと一致しない場合は、以下の手順に従ってカメラモデルを編集してください。
 ソフトウェア内部のカメラモデルデータベースに存在するカメラモデルを指します。.
ソフトウェア内部のカメラモデルデータベースに存在するカメラモデルを指します。.
 ユーザーのカメラモデルデータベースに存在するカメラモデルを指します。.
ユーザーのカメラモデルデータベースに存在するカメラモデルを指します。.
 ソフトウェア内部のカメラモデルデータベースに存在するカメラモデルのうち、ユーザーによって編集されたものを指します。.
ソフトウェア内部のカメラモデルデータベースに存在するカメラモデルのうち、ユーザーによって編集されたものを指します。.
![]() EXIFデータからパラメータが取得されたカメラモデルを指します。.
EXIFデータからパラメータが取得されたカメラモデルを指します。.
 プロジェクトファイルから取得したカメラモデルを指します。.
プロジェクトファイルから取得したカメラモデルを指します。.
- プロジェクトの処理が完了し、品質レポートの 「品質チェック」 セクションの 「カメラ 最適化」に、 初期焦点距離と最終焦点距離の相対差が5%を超える値が表示された場合、黄色のチェックマークが表示されます。この場合、カメラの初期値を最適化された値に変更してください。詳細については、「 カメラの初期値を最適化された値に変更する方法」を参照して
- または、このカメラモデルを使用して処理されたプロジェクトがないにもかかわらず、カメラモデルの値が既知の値と大きく異なる場合。.
既存のカメラモデルを変更するには:
1. カメラモデル 上記の手順に従って、編集する
セクションで 「カメラモデル」、 「編集」をクリックします。
3. レンズの種類を 「パースペクティブレンズ」 または 「魚眼レンズ」から選択します。
4. パラメータの値を変更して編集します。 [クリア]をクリックすると、EXIFデータからパラメータを推定できます [EXIFから推定]。5
. 編集した情報を保存するには、次の2つの方法があります。
- カメラのモデルは、 [データベースに保存] (アイコンに
 はカメラのモデル名が表示されます)を [OK]。
はカメラのモデル名が表示されます)を [OK]。 - または、カメラモデルをプロジェクト専用として使用し、データベースに保存しないことも可能です。その場合は、 「OK」 アイコン
 カメラモデル名が表示された
カメラモデル名が表示された
カメラ名_焦点距離_センサー幅×センサー高さ
カメラモデルが検出されない場合、または実際のカメラモデルがカメラの仕様を満たしていない場合は、以下の手順で新しいカメラモデルを作成できます。
セクションで [カメラモデル]をクリックします [新規]。
のいずれかのレンズタイプを選択します [パースペクティブレンズ] または [魚眼レンズ]
3. パラメータの値を変更して編集します。 [クリア]をクリックして EXIF データからパラメータを推定できます [EXIF から推定]。
4. 新しいカメラを保存するには、次の 2 つのオプションがあります。
- カメラのモデルは、 [データベースに保存] (アイコンに
 はカメラのモデル名が表示されます)を [OK]。
はカメラのモデル名が表示されます)を [OK]。 - または、カメラモデルをプロジェクト専用として使用し、データベースに保存しないことも可能です。その場合は、 「OK」 アイコン
 カメラモデル名が表示された
カメラモデル名が表示された
カメラ名_焦点距離_センサー幅×センサー高さ
リセットする  編集したカメラモデルを
編集したカメラモデルを  データベースカメラモード
データベースカメラモード
内部カメラモデルデータベースから取得したカメラモデルが変更された場合、以下の手順で変更を元に戻すことができます。
セクションで 「カメラモデル」、「 カメラモデル名」 ドロップダウンリストをクリックします。
2. リセットするカメラモデルを選択します。
3. 「復元」。
4. 「OK」。