で画像がキャリブレーションされていない場合 1「初期処理」を使用して手動でキャリブレーションできます rayCloud。この記事では、PIX4Dmapperでキャリブレーションされていないカメラ(画像)をキャリブレーションする手順を段階的に説明します。
画像をキャリブレーションするには、その画像のキーポイントをプロジェクトの他の画像と正確に一致させる必要があります。少なくとも2つの画像で一致するキーポイントごとに、3Dポイントが生成されます。キャリブレーションされていない画像は、他の画像との一致が見つからなかったか、一致が正確であるとラベル付けされていないため、キャリブレーションされていません。したがって、この画像をキャリブレーションするには、この画像とキャリブレーション済みの画像との間で、新しい一致を手動で定義する必要があります。.
カメラを手動でキャリブレーションするには:
1. メニューバーで、 [表示] > [rayCloud]。
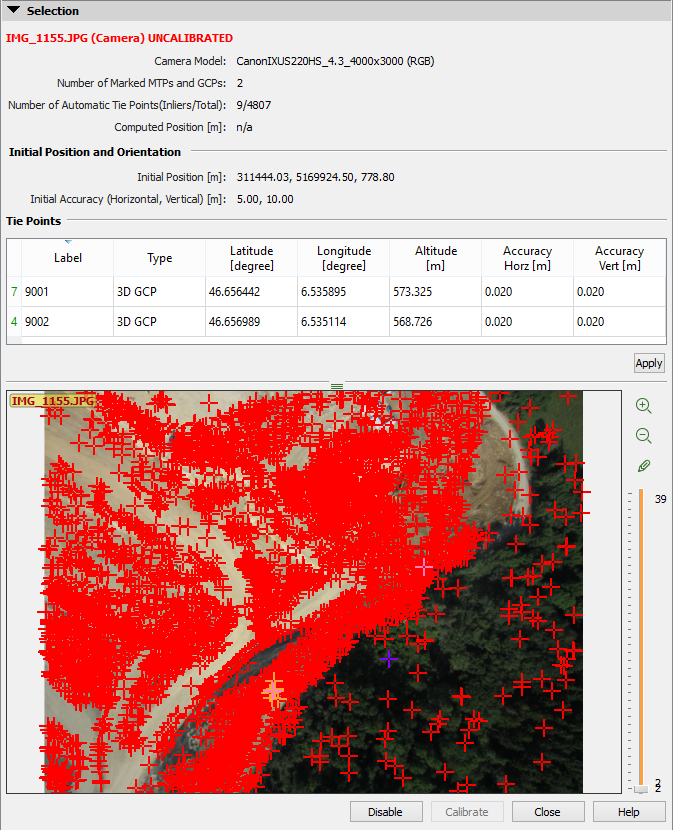
をクリックします キャリブレーションされていないカメラ で rayCloud。
セクションに [選択]、選択したカメラに対応するポイントが画像上に表示されます。
- 赤十字:他の画像のどのキーポイントとも一致しない自動キーポイント。
- オレンジ色の十字:他の画像のキーポイントと正確に一致する可能性が非常に高い自動キーポイント。
- 黄色の十字:選択した画像にマークされたGCP、チェックポイント、または手動タイポイントは インライア。
- ピンクの 十字:選択した画像上にマークされているが、外れ値とみなされるGCP、チェックポイント、または手動タイポイント。
セクションには、 タイポイント」 選択したカメラにマークされているすべてのタイポイントが表示されます。
4. 赤またはオレンジ色の十字をダブルクリックします。選択した十字が 紫色。
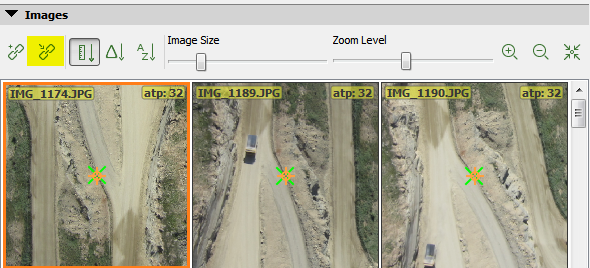
5. 赤とオレンジの十字はそれぞれキーポイントを表し、一致する可能性が高い3Dポイントに関連付けられています。画像セクションには、 関連付け られた3Dポイントを使用してこのキーポイントが見える可能性のある画像の一覧が表示されます。キーポイントは、オレンジ色の円で囲まれたオレンジ色の十字でマークされています。これらの画像における3Dポイントの投影は、緑色の十字で表示されます。
画像内の提案されたポイントが、キャリブレーションされていないカメラのキーポイントと一致する場合、 「タイポイントに接続」  。これにより、マークされた画像を使用して新しい手動タイポイントが作成されます。
。これにより、マークされた画像を使用して新しい手動タイポイントが作成されます。
6. マッチが追加されるたびに、カメラの位置が再推定されます。この新しい位置を使用して、既存の 3D ポイントを選択した画像に投影します。投影されたこれらの 3D ポイントと既存のキーポイント間の再投影誤差が低い場合、キーポイントは正確であるとラベル付けされ、 インライア。これらのインライアはオレンジ色の十字として表示されます。
7. 他の既存のポイント  (少なくとも 3 つ) を接続するか、 新しい手動タイ ポイント
(少なくとも 3 つ) を接続するか、 新しい手動タイ ポイント  (少なくとも 3 つ) を定義します。
(少なくとも 3 つ) を定義します。
8. 「キャリブレーション」 カメラをキャリブレーションします。
- この画像には少なくとも 20個のインライア。
- 手動でマークされた点(MTP)はすべてインライアです。.
10. 新しいカメラの位置と向きが適切であれば、 [処理] > [再マッチングと最適化]。