利用可能な処理テンプレートの説明は以下のとおりです。
処理オプションテンプレート
特徴
生成された出力
標準
3Dマップ
3Dマップ(点群、3Dテクスチャメッシュ)、DSM、オルソモザイクを生成します。
画像取得:直下または斜め飛行。
典型的な入力:重複度の高いグリッド飛行計画を使用して取得された航空画像。
出力品質/信頼性:高。
処理速度:低速。
適用例:採石場、地籍など。
画像取得:直下または斜め飛行。
典型的な入力:重複度の高いグリッド飛行計画を使用して取得された航空画像。
出力品質/信頼性:高。
処理速度:低速。
適用例:採石場、地籍など。
オルソモザイク
DSM
3Dメッシュ
点群
3Dモデル
3Dモデル(点群、3Dテクスチャメッシュ)を生成します。
画像取得方法:斜め飛行または地上撮影。
典型的な入力:重複度の高い任意の画像。
出力品質/信頼性:高。
処理速度:低速。
応用例:建物、物体、地上画像、屋内画像、検査などの3Dモデル。
画像取得方法:斜め飛行または地上撮影。
典型的な入力:重複度の高い任意の画像。
出力品質/信頼性:高。
処理速度:低速。
応用例:建物、物体、地上画像、屋内画像、検査などの3Dモデル。
3Dメッシュ
点群
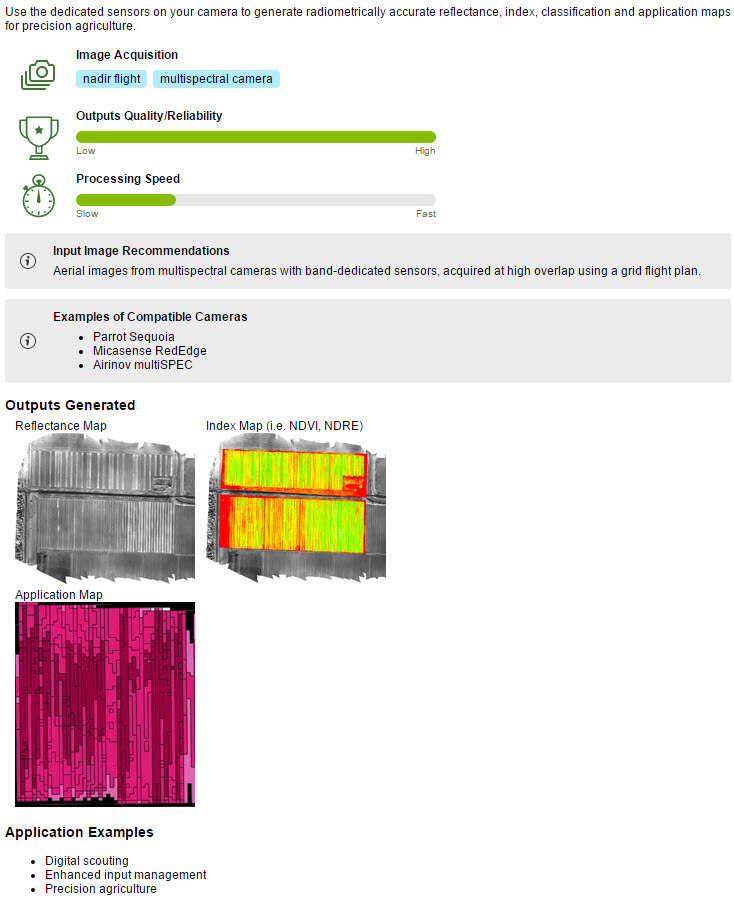
Agマルチスペクトル
反射率、指数(NDVIなど)、分類、およびアプリケーションマップを生成します。
画像取得:マルチスペクトルカメラを
使用した天底飛行。典型的な入力:マルチスペクトルカメラ(Sequoia、Micasense RedEdge、Multispec 4Cなど)で撮影した画像。
出力品質/信頼性:高。
処理速度:低速。
アプリケーション例:精密農業。
画像取得:マルチスペクトルカメラを
使用した天底飛行。典型的な入力:マルチスペクトルカメラ(Sequoia、Micasense RedEdge、Multispec 4Cなど)で撮影した画像。
出力品質/信頼性:高。
処理速度:低速。
アプリケーション例:精密農業。
反射率マップ
インデックスマップ
アプリケーションマップ
急速な
3Dマップ - 高速/低解像度
の処理速度が向上しました
3Dマップ 取得したデータセットの品質を評価するための
出力品質/信頼性:低。
処理速度:高速。
出力品質/信頼性:低。
処理速度:高速。
オルソモザイク
DSM
3Dメッシュ
点群
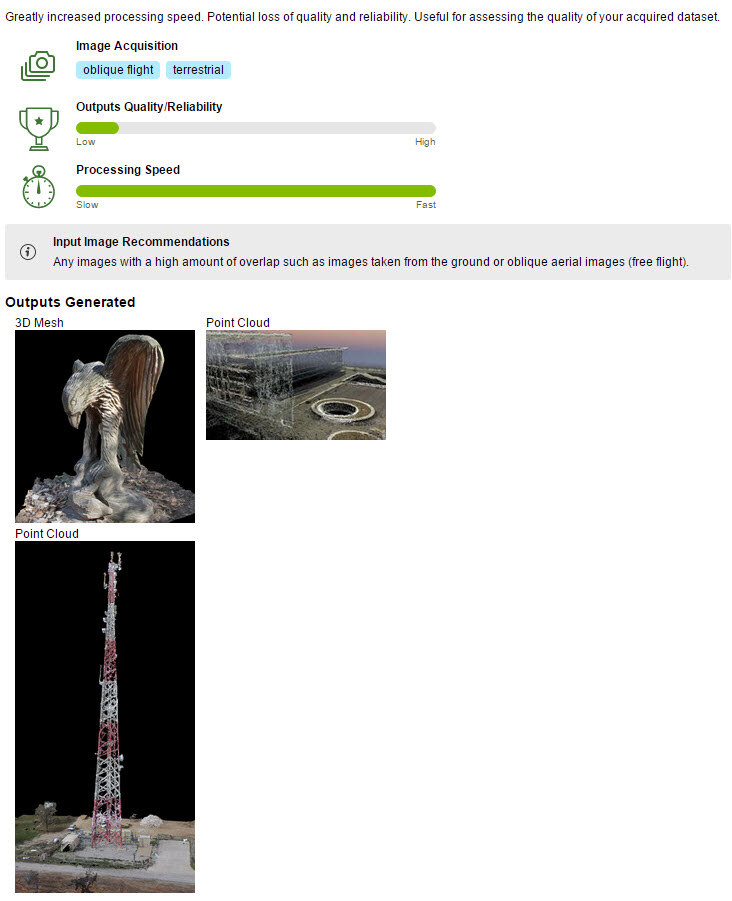
3Dモデル - 高速/低解像度
の処理速度が向上しました
3Dモデル 取得したデータセットの品質を評価するための
出力品質/信頼性:低。
処理速度:高速。
出力品質/信頼性:低。
処理速度:高速。
3Dメッシュ
点群
農業用改造カメラ - 高速/低解像度
の処理速度が向上しました
Ag Modified Camera 取得したデータセットの品質を評価するための
出力品質/信頼性:低。
処理速度:高速。
出力品質/信頼性:低。
処理速度:高速。
反射率マップ
インデックスマップ
アプリケーションマップ
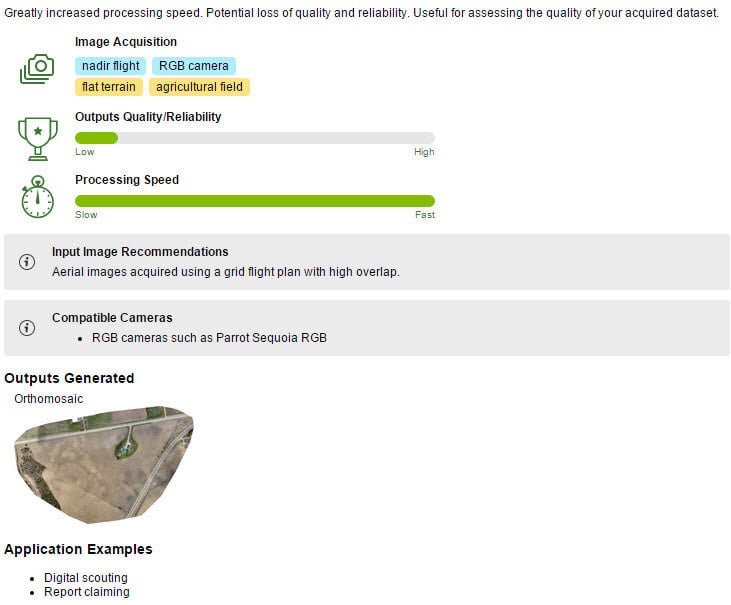
Ag RGB - 高速/低解像度
の処理速度が向上しました
Ag RGB 取得したデータセットの品質を評価するための
出力品質/信頼性:低。
処理速度:高速。
出力品質/信頼性:低。
処理速度:高速。
オルソモザイク
高度な
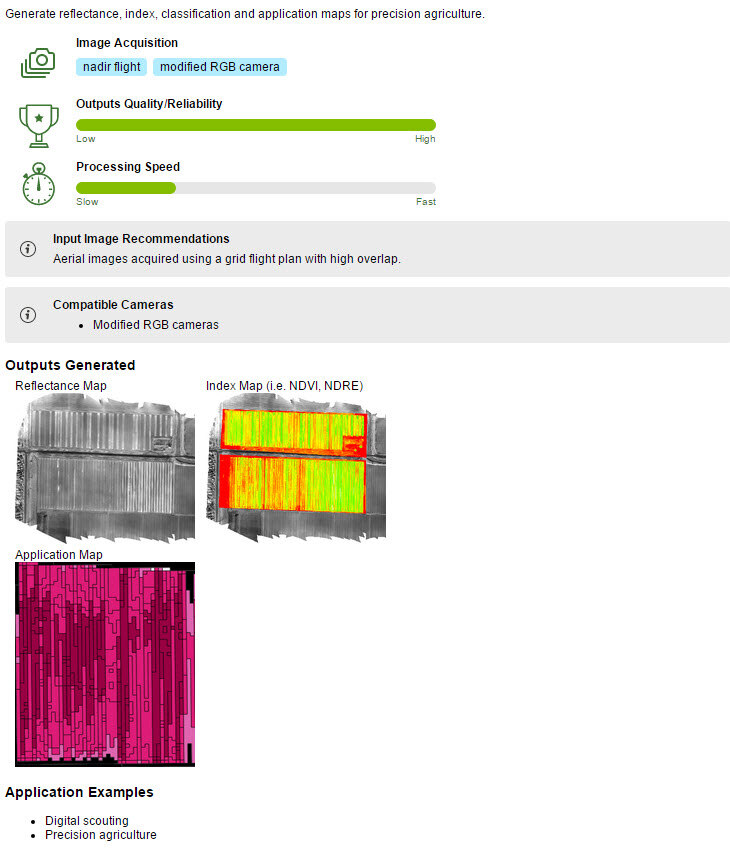
農業改造カメラ
反射率、指数(NDVIなど)、分類、およびアプリケーションマップを生成します。
画像取得方法:改造RGBカメラを使用した天底飛行。
典型的な入力:改造RGBカメラで撮影した画像。
出力品質/信頼性:高。
処理速度:低速。
応用例:精密農業。
画像取得方法:改造RGBカメラを使用した天底飛行。
典型的な入力:改造RGBカメラで撮影した画像。
出力品質/信頼性:高。
処理速度:低速。
応用例:精密農業。
反射率マップ
インデックスマップ
アプリケーションマップ
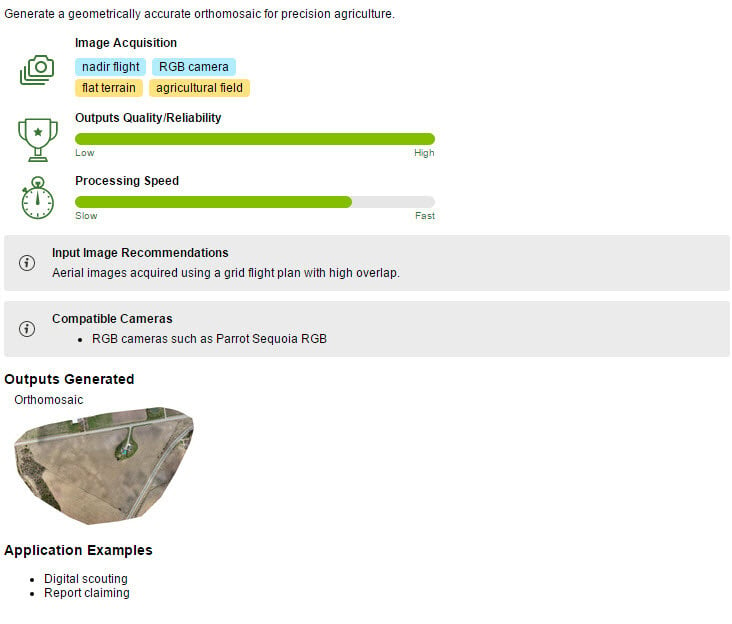
Ag RGB
精密農業用のオルソモザイク画像を生成します。
画像取得方法:RGBカメラを使用した平坦地上空での直下飛行。
典型的な入力:農業用RGBカメラ(Sequoia RGB)で撮影した画像。
出力品質/信頼性:高。
処理速度:平均。
応用例:デジタル偵察、精密農業における報告書作成。
画像取得方法:RGBカメラを使用した平坦地上空での直下飛行。
典型的な入力:農業用RGBカメラ(Sequoia RGB)で撮影した画像。
出力品質/信頼性:高。
処理速度:平均。
応用例:デジタル偵察、精密農業における報告書作成。
オルソモザイク
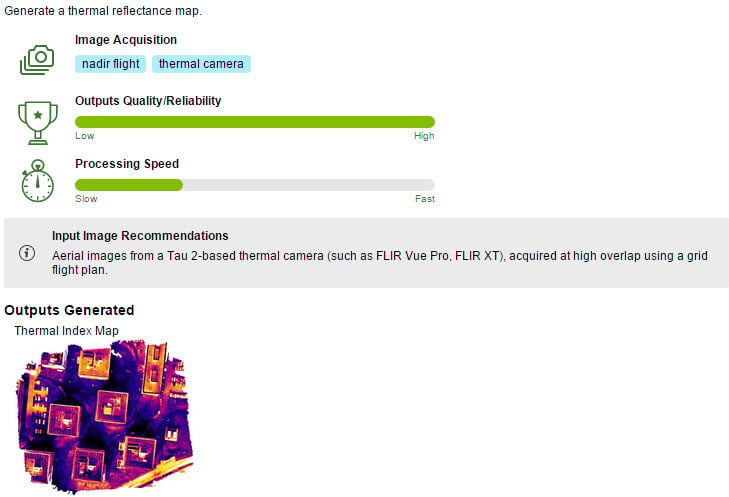
サーマルカメラ
熱反射率マップを生成します。
画像取得方法:サーマルカメラを使用した天底飛行。
典型的な入力:サーマルカメラで撮影した画像(Tau 2ベースのカメラ、FLIR Vue Pro、FLIR XTなど)。
出力品質/信頼性:高。
処理速度:低速。
画像取得方法:サーマルカメラを使用した天底飛行。
典型的な入力:サーマルカメラで撮影した画像(Tau 2ベースのカメラ、FLIR Vue Pro、FLIR XTなど)。
出力品質/信頼性:高。
処理速度:低速。
熱指数マップ
ThermoMAPカメラ
熱反射率マップを生成します。
画像取得方法:サーモマップカメラを用いた天底飛行。
典型的な入力:サーモマップカメラで撮影した画像。
出力品質/信頼性:高。
処理速度:低速。
画像取得方法:サーモマップカメラを用いた天底飛行。
典型的な入力:サーモマップカメラで撮影した画像。
出力品質/信頼性:高。
処理速度:低速。
熱指数マップ
注: ウィンドウでは
[処理オプションテンプレート]というタイトルのセクション
[個人用] の上に
[標準] ユーザーが新しい個人用テンプレートを作成すると、