アクセス:
- メニューバーで、 [プロジェクト] > [画像プロパティエディター...]、 [位置情報と向き]、 [ファイルから...]

- 新しいプロジェクトを作成する際、画像を読み込んだ後、 画像プロパティ ウィザード 「位置情報と向き」をクリックします 「ファイルから」
ポップアップ 「位置情報ファイルを選択 は、ファイルから画像の位置情報(座標と向き)をインポートするために使用されます。
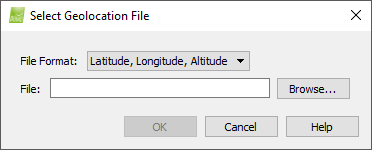
ファイル 形式の ドロップダウンメニューには、サポートされているファイル形式のリストが表示されます。
これらのファイルの内容と形式の詳細については、 入力ファイルを参照して。
アクションボタンは4つあります。
- 参照: 位置情報ファイルを選択します。
- OK: 変更内容を確認します。
- キャンセル: 変更を保存しません。
- ヘルプ: PIX4Dmapperのヘルプを開きます。
緯度、経度、高度
このオプションを選択すると、Pix4D のファイル形式で WGS84 (緯度、経度、高度) 座標を含む位置情報ファイルがインポートされます。位置情報ファイルの形式の詳細については、「 入力ファイル」を。
経度、 緯度、高度
このオプションを選択すると、Pix4D のファイル形式で WGS84 (経度、緯度、高度) 座標を含む位置情報ファイルがインポートされます。位置情報ファイルの形式の詳細については、「 入力ファイル」を。
X、Y、Z
このオプションを選択すると、Pix4D のファイル形式で (X,Y,Z) 座標を含む位置情報ファイルがインポートされます。位置情報ファイルの形式の詳細については、「 入力ファイル」を参照し。
Y、X、Z
このオプションを選択すると、Pix4D のファイル形式で (Y,X,Z) 座標を含む位置情報ファイルがインポートされます。位置情報ファイルの形式の詳細については、「 入力ファイル」を参照し。
3Dロボティクス飛行記録
3DロボットUAVから送信されるログファイルをインポートするには、このオプションを選択してください。ログファイルの形式に関する詳細は、「入力ファイル」を。
クロップカムの 飛行ログ
CropCam UAVから送信されるログファイルをインポートするには、このオプションを選択してください。ログファイルの形式の詳細については、 「入力ファイル」を。
このオプションを選択すると、 「位置情報ファイルを選択 」ポップアップに以下の追加オプションが表示されます。
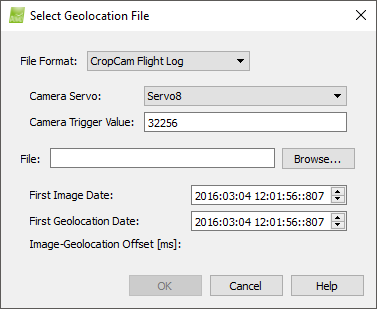
選択肢は2つあります。
- 「 カメラサーボ」 セクションでは、カメラが取り付けられているサーボモーターを定義します。デフォルトでは、カメラサーボは Servo8。カメラが別のサーボモーターに取り付けられている場合は、ドロップダウンリストをクリックして適切なサーボモーターを選択してください。
- カメラ トリガー値は、 画像がトリガーされたときにカメラサーボが取る値に対応します。デフォルト値は 32256。値を変更するには、テキストボックスをクリックして新しい値を入力してください。
と 位置情報ファイル 、3つのステータス概要が表示されます。
- 最初の画像撮影日:最初の画像が撮影された日時を示します。
- 最初の位置情報取得日:最初のジオタグが付けられた日時に対応します。
- 画像位置情報オフセット[ms]:ファイルを選択すると自動的に計算されます。上記の2つの値を使用して、各画像にジオタグを正しく関連付けます。
QuestUAVの 飛行記録
QuestUAVのUAVから送信されるログファイルをインポートするには、このオプションを選択してください。ログファイルの形式の詳細については、 「入力ファイル」を。
テトラカム 飛行記録
TetracamのソフトウェアPixelWrench2によって生成されたログファイルをインポートするには、このオプションを選択してください。ログファイルの形式の詳細については、「 入力ファイル」を。