以下のものが利用可能です。
- A 一般報告 実行後に生成されます 校正 または 再最適化 ステップ:
- をクリックします 「レポート」
 。
。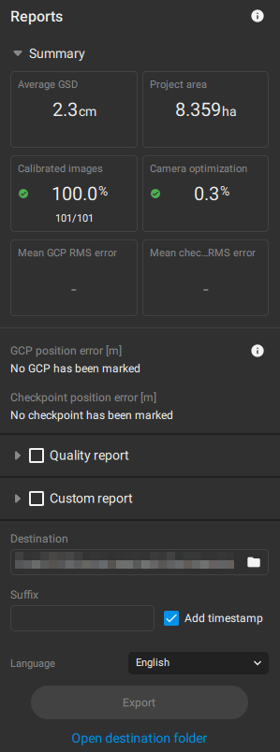
- をクリックします 「レポート」
- 詳細な品質レポート(PDFファイル)。. 詳細な品質レポートをエクスポートするには:
- で レポート 、 [品質レポート] チェックボックスをオンにしてから、 [エクスポート]をクリックします。
- で 処理オプション 、 [エクスポート] - [品質レポート] に。
- の 「ファイル」クリックし、 「品質レポートのエクスポート」を選択します。
この記事では
品質レポートヘッダ
プロジェクト概要
品質チェック
カメラ
内部カメラパラメータ
絶対的な位置情報のばらつき
カメラの位置
重複
2Dキーポイントマッチ
同点ポイント
地上基準点(GCP)
チェックポイント(CP)
手動固定ポイント(MTP)
手動チェックポイント(MCPS)
手動交差点接続点(mITP)
頂点連結点(VTP)
DSM
オルソモザイク
ハードウェアと設定
システム情報
座標参照系
処理設定
較正
深度点群
高密度点群
深みと密度
飛行機
メッシュ
デジタル表面モデル(DSM)
オルソモザイク
以下の表は、品質報告書の内容を示しています。.
注: 品質エクスポートは、英語、スペイン語、フランス語、中国語(簡体字)、日本語、韓国語、中国語(繁体字)、ドイツ語、ポルトガル語、トルコ語、チェコ語、ウクライナ語など、さまざまな言語で生成できます。
品質レポート
| ヘッダ | |
|---|---|
| 日付 | プロジェクトが処理された日付。. |
| プロジェクト名 | プロジェクト名。. |
| バージョン | プロジェクトの処理に使用されたソフトウェアのバージョン。. |
| プロジェクト概要 | |
| カメラ | 画像の撮影に使用されたカメラの機種名。. |
| 対象地域 | 推定プロジェクト面積。. |
| 平均GSD | 初期画像の平均GSD。詳細については、 「地上サンプリング距離(GSD)」を。 |
| プロジェクトCRS(座標参照系) |
処理に使用される水平座標系と垂直座標系。. 垂直座標参照系が指定されていない場合は、水平座標の基底楕円体が使用されます。. |
| 高密度ポイントカウント |
プロジェクトの高密度点群に含まれる点の数。. |
| 品質チェック | |
| 試合 |
較正済み画像あたりのマッチング数の中央値。.
|
| データセット |
プロジェクト全体の画像数に対する、較正済みの画像の割合、およびモデルの再構築に使用された画像の数。.
|
| カメラ最適化 | カメラの初期焦点距離と最適化された焦点距離の差をパーセンテージで表したもの。.
|
| GCP(任意) | インポートされた GCP の数を表示します。 平均RMS位置誤差 マークされたGCPとその シグマ 価値。.
|
| チェックポイント(オプション) | 追加されたチェックポイントの数を表示します。 平均RMS位置誤差 マークされたチェックポイントとその シグマ 価値。.
|
| MTP(任意) | 平均投影誤差を表示します。.
|
| aITPs(任意) | 平均投影誤差を表示します。.
|
| mITPs(オプション) | 平均投影誤差を表示します。.
|
| ATP(任意) | 平均投影誤差を表示します。.
|
| VTP(オプション) | 平均投影誤差を表示します。.
|
カメラ

絶対的な位置情報のばらつき
|
絶対的な位置情報のばらつき |
位置情報誤差は、初期カメラ位置と計算されたカメラ位置の差です。グラフは、各カメラにおける位置情報誤差の軸別分布を示しています。大きな正および負の誤差は、オレンジ色のビンで示されています。画像位置情報誤差は、観測された3D点の精度とは一致しないことに注意してください。. |
| 位置情報誤差 X [単位] |
平均値:X軸における位置情報の誤差の平均値。 中央値:X軸上のすべての値を個別に昇順に並べたときの、誤差の中央値。 シグマ: X軸における誤差の標準偏差。 RMS:X軸における二乗平均平方根誤差。 |
| 位置情報誤差 Y [単位] |
平均値:Y軸における位置情報誤差の平均値。 中央値:Y軸上のすべての値を個別に昇順に並べたときの、誤差の中央値。 シグマ: Y軸の誤差の標準偏差。 RMS:Y軸における二乗平均平方根誤差。 |
| 位置情報誤差 Z [単位] |
平均値:Z軸における平均位置誤差。 中央値:Z軸上のすべての値を個別に昇順に並べたときの、誤差の中央値。 シグマ: Z軸における誤差の標準偏差。 RMS:Z軸方向の二乗平均平方根誤差。 |

カメラの位置
| カメラ位置 | |
|---|---|
| 初期カメラ位置と計算されたカメラ位置。. |
|
| 状態 |
青色 - 画像のEXIF情報、つまり画像の位置情報ファイルから抽出されたカメラの初期位置を示します。 緑色: キャリブレーションまたは再最適化の手順が完了した後の、計算されたカメラの位置を示します。 赤色 - カメラ位置が未校正です(校正に失敗しました)。 |

| 重複 | |
| グラフ |  |
| 説明 | このグラフは、DSMプレビューの各ピクセルにおける重複画像の数を示しています。高精度な3Dモデリングおよびマッピングアプリケーションでは、対象領域の重複部分が緑色で表示される必要があります。つまり、各ピクセルが5枚以上の画像に表示されている必要があります。. |
試合

同点ポイント
| 地上基準点(GCP) | |
|---|---|
| ラベル | GCPの名称。. |
| 位置誤差 - X[メートルまたはフィート] | X軸における地上基準点の計算位置と初期位置の差、すなわち計算位置-初期位置。. |
| 位置誤差 - Y[メートルまたはフィート] | Y軸における地上基準点の計算位置と初期位置の差、すなわち計算位置-初期位置。. |
| 位置誤差 - Z[メートルまたはフィート] | Z軸における地上基準点の計算位置と初期位置の差、すなわち計算位置-初期位置。. |
| 再投影 誤差 [px] |
GCPがマークされた画像と、GCPが再投影された画像における平均距離。. |
| 精度 - X/Y [メートルまたはフィート] | このプロジェクトで示されているGCPのXY方向の精度X/Y。. |
| 精度 - Z [メートルまたはフィート] | 本プロジェクトで与えられたGCPのZ方向の精度Z。. |
| 検証済み/マーク済み | 検証済み:GCPがマークされ、再構築に考慮された画像の数。 マーク済み:GCPがマークされた画像。 |
| 平均 | 各方向(X、Y、Z)における平均位置誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 中央値 | 各方向(X、Y、Z)におけるすべてのGCPの誤差を個別に昇順に並べたときの中央値。. |
| ミン | 各方向(X、Y、Z)におけるすべてのGCP(地上基準点)の最小誤差。. |
| マックス | 各方向(X、Y、Z)における、すべてのGCP(地上基準点)での最大誤差。. |
| RMS | 各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| シグマ | 各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| チェックポイント(CP) | |
|---|---|
| ラベル | 検問所の名前。. |
| 位置誤差 - X[メートルまたはフィート] | 計算されたチェックポイントと元の位置とのX方向における差(計算された位置 - 初期位置)。. |
| 位置誤差 - Y[メートルまたはフィート] | 計算されたチェックポイントと元の位置とのY方向の差(計算された位置 - 初期位置)。. |
| 位置誤差 - Z[メートルまたはフィート] | 計算されたチェックポイントと元の位置とのZ方向における差(計算された位置 - 初期位置)。. |
| 再投影 誤差 [px] |
チェックポイントがマークされた画像と、それが再投影された画像における平均距離。. |
| 精度 - X/Y [メートルまたはフィート] | このプロジェクトで指定されたチェックポイントのXY方向の精度(X/Y)。. |
| 精度 - Z [メートルまたはフィート] | 本プロジェクトで指定されたチェックポイントのZ方向の精度Z。. |
| 検証済み/マーク済み | 検証済み:チェックポイントがマークされ、再構築に考慮された画像の数。 マーク済み:チェックポイントがマークされた画像。 |
| 平均 | 各方向(X、Y、Z)における平均位置誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 中央値 | 各方向(X、Y、Z)におけるすべてのチェックポイントでのエラー値を、昇順に並べたときの中央値。. |
| ミン | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最小誤差。. |
| マックス | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最大誤差。. |
| RMS | 各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| シグマ | 各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 手動固定ポイント(MTP) | |
|---|---|
| ラベル | MTPの名称。. |
| 再投影 誤差 [px] |
MTPがマークされた画像と、MTPが再投影された画像における平均距離。. |
| 検証済み/マーク済み | 検証済み:MTPがマークされ、再構築に考慮される画像の数。 マーク済み:MTPがマークされた画像。 |
| 平均 | 各方向(X、Y、Z)における平均位置誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 中央値 | すべてのMTPにおけるエラー値を昇順に並べたときの、それぞれのエラー値の中央値。. |
| ミン | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最小誤差。. |
| マックス | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最大誤差。. |
| RMS | 各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| シグマ | 各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 手動検問所(MCP) | |
|---|---|
| ラベル | MCPの名称。. |
| 再投影 誤差 [px] |
MCPがマークされた画像と、それが再投影された画像における平均距離。. |
| 検証済み/マーク済み | 検証済み:MCPがマークされ、再構築に考慮される画像の数。 マーク済み:MCPがマークされた画像。 |
| 平均 | 各方向(X、Y、Z)における平均位置誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 中央値 | すべてのMCPにおける誤差を個別に昇順に並べたときの中央値。. |
| ミン | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最小誤差。. |
| マックス | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最大誤差。. |
| RMS | 各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| シグマ | 各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 手動交差点接続点(mITP) | |
|---|---|
| ラベル | mITPの名称。. |
| 再投影 誤差 [px] |
mITPがマークされた画像と、それが再投影された画像における平均距離。. |
| 検証済み/マーク済み | 検証済み:MTPがマークされ、再構築に考慮される画像の数。 マーク済み:MTPがマークされた画像。 |
| 平均 | 各方向(X、Y、Z)における平均位置誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 中央値 | すべてのmITPにおける誤差を個別に昇順に並べたときの中央値。. |
| ミン | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最小誤差。. |
| マックス | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最大誤差。. |
| RMS | 各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| シグマ | 各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 頂点連結点(VTP) | |
|---|---|
| ラベル | VTPの名称。. |
| 再投影 誤差 [px] |
VTPがマークされた画像と、VTPが再投影された画像における平均距離。. |
| 検証済み/マーク済み | 検証済み:VTPがマークされ、再構築に考慮される画像の数。 マーク済み:VTPがマークされた画像。 |
| 平均 | 各方向(X、Y、Z)における平均位置誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| 中央値 | すべてのVTPにおけるエラー値を昇順に並べたときの、それぞれのエラー値の中央値。. |
| ミン | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最小誤差。. |
| マックス | 各方向(X、Y、Z)におけるすべてのチェックポイントでの最大誤差。. |
| RMS | 各方向(X、Y、Z)における二乗平均平方根誤差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
| シグマ | 各方向(X、Y、Z)における誤差の標準偏差。詳細については、「 品質レポートにおけるGCP誤差の定義」を参照してください。 |
デジタル表面モデル(DSM)
| DSM | |
|---|---|
| 画像 |
|
| 説明 |
デジタル表面モデル(DSM)作成ステップ完了後に作成されたDSMの画像。. |


ハードウェアと設定
| システム情報 | |
|---|---|
| ハードウェア | 処理に使用されるCPU、RAM、およびGPU。. |
| オペレーティング·システム | 処理に使用されるオペレーティングシステム。. |
| 座標参照系 | |
| 画像座標参照系 | 画像の位置情報を示す座標系。. |
| 地上基準点(GCP)座標参照系 | GCP(地上基準点)を使用する場合は、その座標系を指定します。. |
| プロジェクト座標参照系 | プロジェクトの出力座標系。. |
処理設定
| 較正 | |
|---|---|
| テンプレート |
これは、処理のためにインポートされたデータセットに応じて選択可能なテンプレートを示しています。
詳細については、 「キャリブレーション - PIX4Dmatic」。 |
| パイプライン |
これは、処理に使用するデータセットに応じて選択可能なパイプラインを示しています。
詳細については、 「キャリブレーション - PIX4Dmatic」。 |
| 画像スケール | キーポイント抽出に使用される画像スケールの値。.
詳細については、 「処理オプション - 画像スケール」。 |
| 最大抽出キーポイント |
詳細については、 「処理オプション - キーポイント」。 |
| 内部信頼感 |
詳細については、 「処理オプション - 内部信頼度」。 |
| 自動ITPの再最適化 |
PIX4Dmaticを有効にすると、画像間の構造線交点を生成して照合します。
詳細については、 「自動ITP - PIX4Dmatic」 |
| 間隔 | 処理に必要な時間 キャリブレー 。 |
| 再最適化 | |
| 再戦 |
PIX4Dmaticを有効にすると、画像間のマッチングがより多く計算され、カメラの内部および外部パラメータが最適化されます。
|
| カメラ内部 | に応じて最適化されるか最適化されないかが決まります。 再最適化 設定 |
| 間隔 | に必要な時間 。 |
| 深度点群 | |
| 間隔 | 処理ステップに必要な時間 深度点群の 。 |
| 高密度点群 | |
| アルゴリズム |
詳細については、 「アルゴリズム - 高密度点群 - PIX4Dmatic」。 |
| 画像スケール |
詳細については、 「処理オプション - 画像スケール」。 |
| マルチスケール |
詳細については、 「処理オプション - マルチスケール」。 |
| 密度 | 点群の密度を定義します。
詳細については、 「処理オプション - 密度」。 |
| 最小試合数 | 最小試合数(2-6、3デフォルト)は、この3D点を画像に再投影する有効な最小回数を表します。.
詳細については、 「処理オプション - 最小一致数」。 |
| ノイズフィルター |
詳細については、 「処理オプション - ノイズフィルター」。 |
| スカイフィルター |
詳細については、 「処理オプション - スカイフィルター」。 |
| 間隔 | の処理に必要な時間 Densify 。 |
| 深みと高密度融合 | |
| 距離 | 深度点から高密度点群までの、融合に必要な最小距離。. |
| 間隔 | 処理に必要な時間 深度と高密度融合 。 |
| メッシュ | |
| 入力点群* |
これは、メッシュ生成の入力点群としてどの点群が選択されるかを定義します。
詳細については、 「処理オプション - 入力点群」。 |
| テンプレート |
これは、処理のためにインポートされたさまざまな種類のデータセットに応じて選択できるテンプレートを示しています。
詳細については、 「処理オプション - テンプレート」。 |
| テクスチャサイズ |
テクスチャサイズ(1024x1024~32768x32768ピクセル、デフォルトは8192x8192ピクセル)。. 詳細については、 「処理オプション - テクスチャサイズ」。 |
| デゴースティング |
このオプションは、緩やかな外れ値検出または積極的な外れ値検出に使用できます。メッシュ作成時の複雑な形状に役立ちます。
詳細については、 「処理オプション - デゴースティング」。 |
| 壊滅 |
|
| 最大三角形数 |
最終メッシュにおける三角形の最大数。デフォルト値は1,000,000三角形です。. 詳細については、 「処理オプション - 間引き」。 |
| スカイマスク |
詳細については、 「処理オプション - スカイマスク」。 |
| 平滑化 |
生成されたメッシュに平滑化処理を適用します。. |
| 間隔 | 処理ステップに必要な時間 メッシュ 。 |
| デジタル表面モデル(DSM) | |
| 入力点群* |
この処理オプションは、DSM生成に使用する点群を定義します。
|
| 補間 | 補間パラメータは、生成されるDSMの完全性に影響を与えます。
詳細については、 「処理オプション - 補間」。 |
| 表面平滑化 | DSMの表面平滑化に使用されるメディアンフィルタの半径(0~20、12 - デフォルト).
詳細については、 「処理オプション - 表面平滑化」。 |
| 解決 | DSMの生成に使用された解像度。 キャリブレーション ステップで計算された平均GSDが使用される場合は、その値が表示されます。 |
| 間隔 | の処理ステップに必要な時間 デジタル表面モデル(DSM) 。 |
| オルソモザイク | |
| アルゴリズム |
これは、オルソモザイク画像の作成アルゴリズムを定義するものです。
詳細については、 「処理オプション - アルゴリズム」。 |
| 斜め |
このオプションは、斜め撮影プロジェクトのオルソモザイク画像を改善します。
詳細については、 「処理オプション - 斜め」。 |
| デゴースティング |
このオプションは、オルソモザイク画像を生成する際に、飛行中に移動する物体を除去します。
詳細については、 「処理オプション - デゴースティング」。 |
| 解決 | オルソモザイク画像を生成するために使用された解像度。 キャリブレーション 手順で計算された平均GSDが使用される場合は、その値が表示されます。 |
| 間隔 | 処理に必要な時間 オルソモザイク 。 |