この記事では
画像座標系
PIX4Dmaticでは、画像座標系を手動で設定または編集できます。.
画像の水平座標系または垂直座標系を編集するには、 画面右下隅にある「 カメラ」 タブの編集アイコンをクリックします。
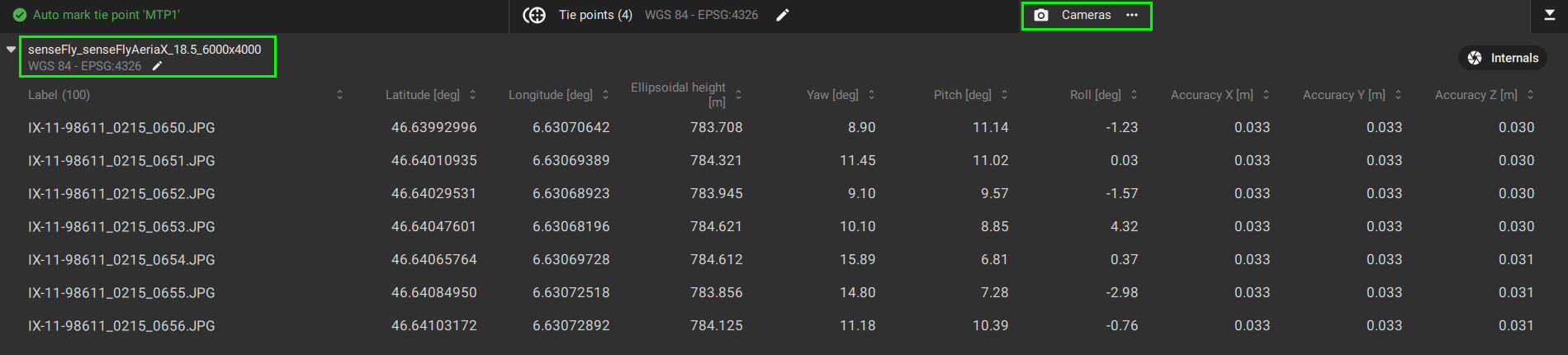
編集アイコンをクリックすると、「画像座標参照系(CRS)の設定」ダイアログボックスが開きます。.

カメラがPIX4Dmaticカメラデータベースに登録されていない場合、または画像に正しいXMPタグが付いていない限り、デフォルトの画像座標系は水平方向がWGS84(EPSG:4326)、垂直方向がEGM96(EPSG:5773)となります。.
GCP座標系
では、水平座標系と垂直座標系の両方を定義できます タイポイント 。

GCP座標参照系(CRS)ウィンドウが表示されます。.
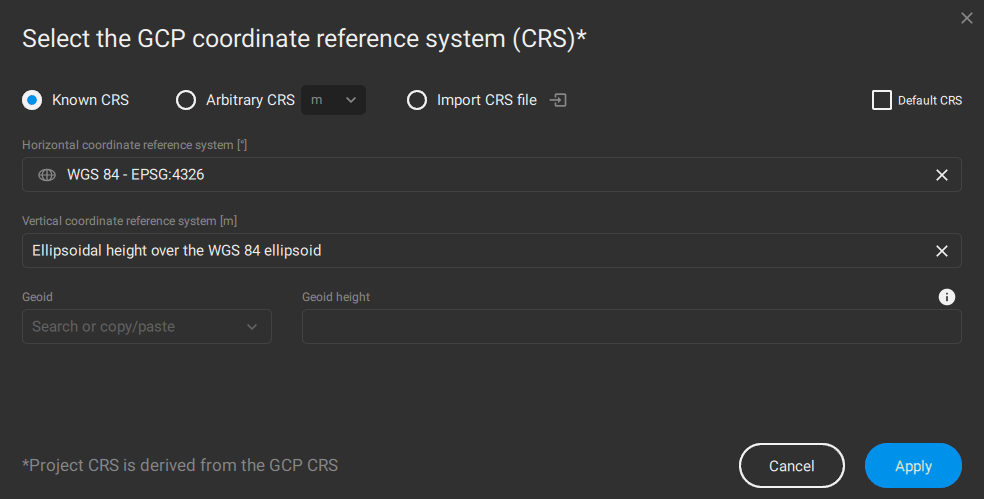
を選択するには 水平座標参照系:
- では 水平座標参照系 ダイアログ、 検索またはコピー&ペースト:
- 名前または
- 座標系のEPSGコード。.
を選択するには 垂直座標参照系:
- では 垂直座標参照系 ダイアログ、 検索またはコピー&ペースト:
- 名前または
- 座標系のEPSGコード。.
- (オプション) ジオイド: 選択した垂直座標系がジオイドをサポートしており、ジオイドモデルがPIX4Dmaticデータベースで利用可能な場合は、ドロップダウンリストからジオイドモデルを選択します。
- (オプション) ジオイド高: 選択した垂直座標系がジオイドをサポートしているが、ジオイドモデルがPIX4Dmaticデータベースにない場合は、その場所のジオイド高の値を入力してください。
詳細情報およびサポートされているジオイドの一覧については、 「PIX4Dmatic でジオイドを使用する方法」。
プロジェクト座標系
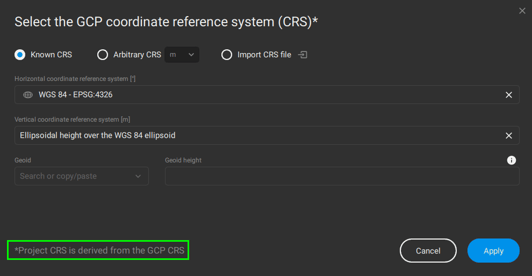
プロジェクトの水平座標系と垂直座標系は、インポートされた画像位置情報データ、または選択されたGCP(地上基準点)の座標系に基づいて定義されます。
プロジェクトの座標系は常に下部のバーに表示されます。
- 場合 GCPの座標系が定義されていないプロジェクトの座標系を対応する UTMゾーン 画像の位置情報に基づいて、 楕円体高*に設定されます。
- 水平方向: WGS 84 / UTM ゾーン 32N - EPSG 32632。.
- 垂直方向:WGS 84 - EPSG 7030楕円体。.
- 場合 GCP(地上基準点)の座標系が定義されている、 プロジェクトの座標系はGCPの座標系に対応します。GCPの座標系が地理座標系である場合、プロジェクト座標系には対応するUTMゾーンが使用されます。
- 水平: CH1903+ / LV 95 - EPSG 2056。.
- 垂直:ベッセル1841 - EPSG 7004楕円体。.
任意座標系
任意座標系またはローカル座標系は、一般的に建設現場や鉱山などで使用されます。このシステムの原点は任意の(ローカルな)点に基づいており、既知の座標系とは一致していません。.
PIX4Dmaticでは、任意の座標を持つ地上基準点(GCP)を使用して、プロジェクトを任意の座標系でジオレファレンスすることができます。.

推奨されるワークフロー[方法A]は以下のとおりです。
- プロジェクトを作成し、画像をインポートします。.
- で 「GCP座標参照系(CRS)の選択」、 「任意CRS」 、単位を選択します。
- GCPをインポートします。.
- 画像上にGCP(地上基準点)をマークする。.
- を実行します キャリブレーション 。
代替ワークフロー[方法B]は以下のとおりです。
- プロジェクトを作成し、画像をインポートします。.
- で 「GCP座標参照系(CRS)の選択」、 「任意CRS」 、単位を選択します。
- を実行します キャリブレーション 。
- GCPが出現する正確な場所に、少なくとも3つのMTPをマークしてください。.
- で タイポイント 、マークされたMTPのタイプをGCPに変更し、座標を手動で入力します。
- インポートファイル内のMTPの名前を、GCPの実際の名前に変更してください。.
- を実行します 再最適化 。
- 追加のGCPをインポートしてマークします。.
- を実行します 再最適化 。
座標系をインポート
PIX4Dmaticは、Well-Known Text(WKT)形式でフォーマットされたカスタムサイトローカライズファイルをサポートしています。WKTは、翻訳、回転、拡大縮小のパラメータを含む、標準化されたテキストベースの表現形式です。.
PIX4Dmaticで座標系をインポートするためにサポートされているファイル形式は、txt、prj、wkt、csv、およびTrimble形式の.dcと.calです。.
詳細については、次の記事をお読みください。 「PIX4DmaticおよびPIX4Dcloud用のサイトローカライゼーションファイルを取得する方法」
水平グリッドの補正と変換
PIX4Dmaticは、最も一般的な水平グリッド補正と変換をサポートしています。.
補正値は、選択された座標系に基づいて自動的に適用されます。.