問題
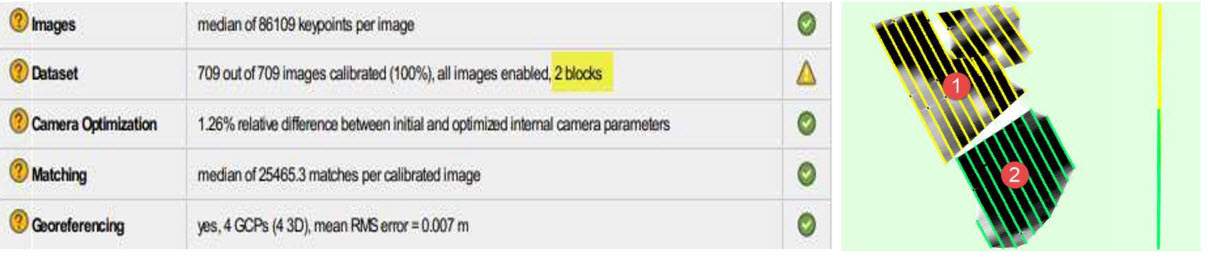
PIX4Dmapperの処理ステップ1の後には、キャリブレーション済みの画像ブロックが複数存在します。.
説明
ブロックとは、一緒にキャリブレーションされた画像の集合です。複数のブロックが存在する場合、画像グループ間のマッチングが不十分で、全体的な最適化が実現できないことを示しています。プロジェクトに複数の異なるブロックが含まれている場合、それらのブロック間の地理参照が正確でない可能性があります。理想的には、プロジェクトには1つのブロックのみが含まれるべきです。品質レポート内のブロック数を確認する方法については、以下を参照してください。.
原因
この問題を引き起こす原因はいくつか考えられます。
- このプロジェクトは、異なる時期、異なる高度、異なるカメラを使用して実施された複数の飛行から構成されている。.
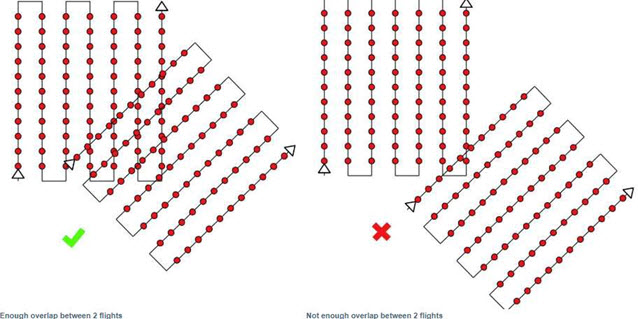
- 画像取得計画間の重複が十分ではない。.
- 画像が正しく取得されなかった場合、回廊プロジェクトでこの問題が発生する可能性があります。.
- 地形は平坦で、農地や雪、砂、水など、均質な景観が広がっている。.
- プロジェクト対象地域は森林と密生した植生で構成されている。.
- 地形および画像データセットのキャリブレーション方法が不適切です。.
ソリューション
前述の原因に対する考えられる解決策を以下に提案する。.
原因1:
- 飛行高度は、飛行ごとに大きく異ならないようにしてください。高度が異なると、空間解像度も変わってきます。詳細については、「 PIX4Dmapperは、異なる飛行高度で撮影された画像を処理できますか?」。
- 同じ照明条件、同じ時間帯、同じ太陽の方向、同じ気象条件下で飛行してみてください。.
原因2:
- 各計画図が十分な重なり部分を確保して画像を捉えていることを確認してください。.
原因3:
- 回廊マッピングデータセットは、少なくとも2本の飛行経路から構成され、それらの経路は高い重複度を持つべきである。.
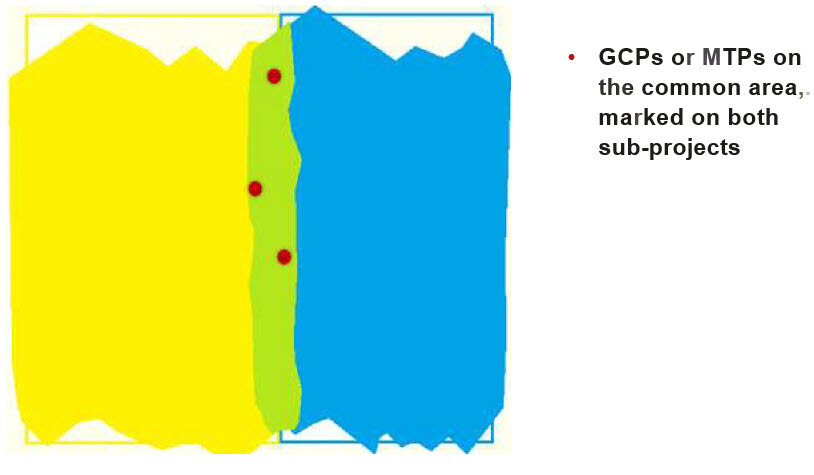
- 画像に位置情報を付加することも推奨されます。モデル内にGCPを適切に配置することを強く推奨します。 回廊マッピングにおける地上基準点(GCP)の数と分布。
原因4:
- キーポイント画像スケールを低くして処理します: この処理オプションでは、デフォルトの元のキーポイント画像スケールよりも多くのキャリブレーション済み画像が生成される可能性があります。詳細については、 [メニュー] > [処理] > [処理オプション...] > [1. 初期処理] > [一般] を。
- を有効にする 幾何学的に検証されたマッチング。
原因5:
- キーポイント画像スケールを低くして処理する:この処理オプションでは、デフォルトの元のキーポイント画像スケールよりも多くのキャリブレーション済み画像が生成される可能性があります。詳細については、以下を参照してください。
- メニュー プロセス > 処理オプション... > 1. 初期処理 > 一般.
原因6:
- ことを確認してください 校正方法が 、あなたのプロジェクトに適している
ヒント: 上記すべてのケースにおいて、ブロック間に共通の手動タイポイントを追加することをお勧めします。詳細については、
「rayCloud で手動タイポイント (MTP) を追加/インポートおよびマークする方法」を参照してください