この記事では
プロジェクトの設定 ログイン
ログイン 新規プロジェクトの
新規プロジェクトの 作成 タイポイントの
作成 タイポイントの 参照系
参照系 画像座標参照系GCP 座標参照系
画像座標参照系GCP 座標参照系 プロジェクト座標系
プロジェクト座標系
 キャリブレーション
キャリブレーション![]() ガウススプラットと点群
ガウススプラットと点群 高密度点群
高密度点群 メッシュ
メッシュ DSM
DSM オルソモザイク
オルソモザイク
 エクスポートフォルダを探してください
エクスポートフォルダを探してくださいビデオチュートリアル
|
PIX4Dmaticインターフェースの概要
|
PIX4Dmaticで航空画像を処理する方法
|
|
PIX4DmaticでPIX4Dcatchデータを処理する方法
|
|
プロジェクトの設定
PIX4Dmaticの最初のステップは、プロジェクトを設定し、必要なパラメータを定義し、処理に進む前に必要なデータを追加することです。.
ログイン
Pix4Dアカウントを新規登録するか、既存のPix4Dアカウントを使用してソフトウェアにログインしてください。.
- をクリックする
 アイコン ログイン」を 画面右上の
アイコン ログイン」を 画面右上の - を入力し メールアドレス 、 「続行」をクリックしてください。
- を入力して パスワード をクリックしてください 「ログイン」
新しいプロジェクトを作成する
PIX4Dmatic では、ホーム画面に画像や画像フォルダをドラッグアンドドロップするか、メニューバーを使用するか、Ctrl + N (⌘ + N) ショートカットを。
入力ファイルをドラッグアンドドロップする
- ドラッグ&ドロップします ホーム画面に画像や画像フォルダを
- してください プロジェクト名、 を 指定 プロジェクトのパス、およびプロジェクトの座標参照系(CRS)
- をクリックしてください 「開始」。

新しいプロジェクトが作成され、処理準備が整いました。追加の入力ファイルをインポートするには、 「ファイル」 左上の
詳細については、 PIX4Dmatic のプロジェクトを作成してください。
インポート接続点(GCPおよびCP)
プロジェクトにタイポイント(地上基準点(GCP)とチェックポイント(CP))を追加してマークすることは任意ですが、プロジェクトの絶対的な精度を維持および検証するために推奨されます。.
からアクセスでき [ファイル] メインヘッダーの [タイポイント]パネル。

- [1] メニューバーに移動し、 [ファイル] > [インポート] > [GCP]... GCPファイルを選択します。
- をクリックして
 同点ポイント(0)」 画面右下にある
同点ポイント(0)」 画面右下にある - [2] ドラッグ アンド ドロップする GCP ファイルを ディスクから選択して GCP ファイルを指定します。
- [3]ドロップダウンメニューをクリックして
 を選択します
を選択します  ...
... - タイポイントファイルを選択してください。.
タイポイントは、さまざまな段階でインポートおよびマーキングできます。
- キャリブレーションステップの前: このステップでは、画像上のタイポイントの位置が初期画像の地理的位置情報と向きのみに基づいて決定されるため、正確ではなく、より多くの手作業が必要になります。ただし、処理前にタイポイントをマークすることで、キャリブレーションステップの再処理や再最適化の必要性をなくすことができます。
- キャリブレーション処理後: 外部および内部カメラパラメータが計算されるため、画像上のタイポイントの位置精度が向上します。ただし、キャリブレーション処理を再処理または再最適化する必要があります。
タイポイントに関する詳細情報: タイポイント - PIX4Dmatic
タイポイントのマーキング方法の詳細については、 PIX4Dmaticの「タイポイントのマーキング」をご覧ください。
座標参照系
画像とタイポイントをインポートした後、座標参照系(CRS)を設定する必要があります。PIX4Dmaticでは、画像、GCP(地上基準点)、およびプロジェクトのCRSを設定できます。.
画像座標参照系
PIX4Dmaticでは、画像座標系を手動で設定または編集できます。.
画像の水平座標系または垂直座標系を編集するには、 ![]() 画面右下隅にある「 カメラ」 タブの編集アイコンをクリックします。
画面右下隅にある「 カメラ」 タブの編集アイコンをクリックします。

編集アイコンをクリックすると、「画像座標参照系(CRS)の設定」ダイアログボックスが開きます。.

カメラがPIX4Dmaticカメラデータベースに登録されていない場合、または画像に正しいXMPタグが付いていない限り、デフォルトの画像座標系は水平方向がWGS84(EPSG:4326)、垂直方向がEGM96(EPSG:5773)となります。.
GCP(地上基準点)座標参照系
では、水平座標系と垂直座標系の両方を定義できます タイポイント 。

GCP座標参照系(CRS)ウィンドウが表示されます。.
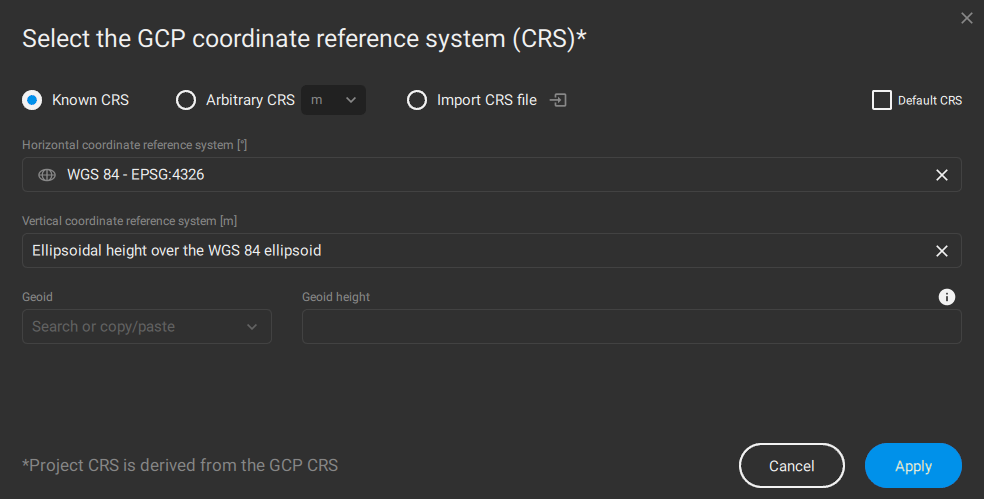
を選択するには 水平座標参照系:
- では 水平座標参照系 ダイアログ、 検索またはコピー&ペースト いずれの場合も:
- 座標参照系の名称。.
-
- 座標系のEPSGコード。.
を選択するには 垂直座標参照系:
- では 垂直座標参照系 ダイアログ、 検索またはコピー&ペースト いずれの場合も:
- 座標参照系の名称。.
-
- 座標系のEPSGコード。.
- (オプション) ジオイド: 選択した垂直座標系がジオイドをサポートしており、ジオイドモデルがPIX4Dmaticデータベースで利用可能な場合は、ドロップダウンリストからジオイドモデルを選択します。
- (オプション) ジオイド高: 選択した垂直座標系がジオイドをサポートしているが、ジオイドモデルがPIX4Dmaticデータベースにない場合は、その場所のジオイド高の値を入力してください。
詳細情報およびサポートされているジオイドの一覧については、 「PIX4Dmatic でジオイドを使用する方法」。
プロジェクト座標参照系
プロジェクトの水平座標系と垂直座標系は、インポートされた画像の地理位置情報データ、または選択されたGCP座標系のいずれかによって決定されます。
- GCP(地上基準点)の座標系 いない 、PIX4Dmaticはプロジェクトの座標系を、画像の地理的位置に対応するWGS84/UTMゾーンに自動的に設定します。垂直座標系には楕円体高が使用されます。
- GCP座標系 いる 、プロジェクトはGCPと同じ座標系を採用します。ただし、GCPが地理座標系である場合、出力座標系はデフォルトで対応するWGS84/UTMゾーンになります。

処理オプション
プロジェクトの設定が完了したら、次のステップは処理です。PIX4Dmaticは、画像キャリブレーションからデジタル表面モデル(DSM)やオルソモザイクの生成まで、各処理段階ごとに設定可能なオプションを幅広く提供し、さまざまなプロジェクト要件に対応します。PIX4Dmaticには、以下の3つのデフォルト処理テンプレートが含まれています。
- 天底
- 斜め
- PIX4Dcatch
ユーザーは、定義済みの設定を保存、再利用、共有して一貫性のあるワークフローを実現するためのカスタム処理テンプレートを作成することもできます。詳細については、 「カスタム処理テンプレート - PIX4Dmatic」。
較正
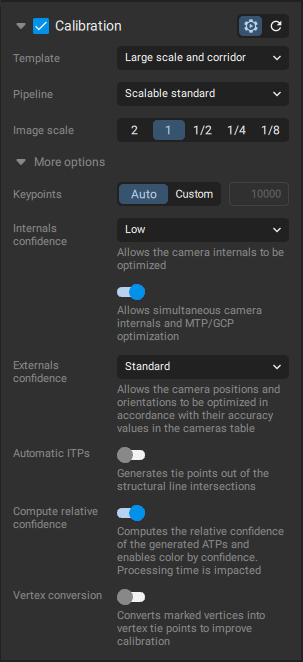
キャリブレーション はデータセット処理の最初のステップであり、後続のステップの基礎を築きます。通常、デフォルト設定が最適な出発点となります。
詳細については、 PIX4Dmaticのキャリブレーションをご覧
PIX4Dcatchプロジェクトの場合: PIX4Dcatchデータセットの処理方法 - PIX4Dmatic
ガウススプラッシュと点群
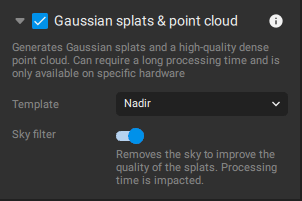
ガウス・スプラッティングは、3Dシーンの再構築とレンダリングのための新しい技術であり、従来のメッシュや点群ではなく、3Dガウス分布の集合としてシーンを表現します。これにより、フォトリアリスティックなレンダリングによる非常に詳細な3Dモデルの作成が可能になります。.
詳細については、 ガウス・スプラッティング - PIX4Dmatic を
高密度点群
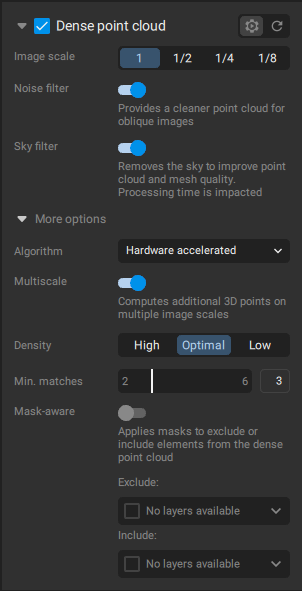
高密度点群は、対象領域を表す3D空間全体に分布する点の集合で構成されます。高密度点群のステップでは、現実世界の3D表現が提供され、PIX4Dmaticで他の2Dおよび3D出力を生成するための基礎となります。.
詳細については、 PIX4Dmaticの「高密度点群」をご覧
AIツール
AIツール: この手順では、オブジェクト選択ツールを有効にするために必要なデータを計算します。この手順は一度だけ実行すれば十分です。

詳細については、 オブジェクト選択ツール - PIX4Dmatic を参照してください。
メッシュ
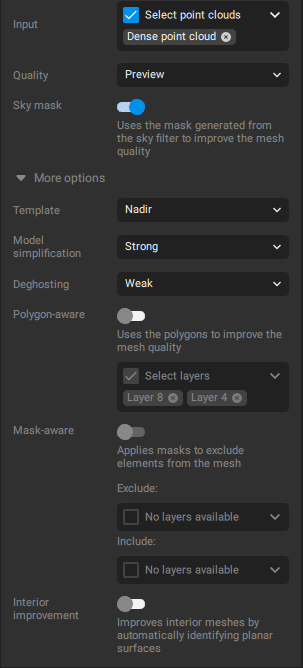
メッシュ 生成 ステップは高密度点群から直接作成されるため、すべてのプロジェクトで必須ではありません。さらに、デジタル表面モデルやオルソモザイクを作成する際にメッシュ生成は必須ではありません。
詳細については、 Mesh - PIX4Dmatic を参照し
DSM
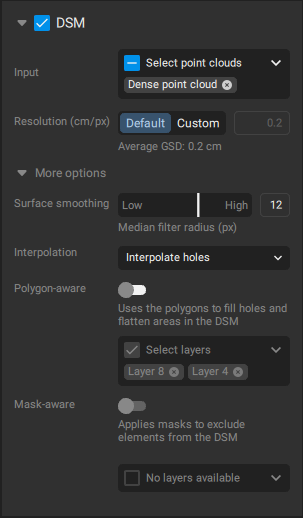
デジタル表面モデル(DSM)は、対象領域内の自然地形と人工地形の両方を捉えた、標高の2次元表現です。DSMの作成はオルソモザイク画像の生成に不可欠であり、DSM処理設定の調整はオルソモザイク画像にも影響を与えます。このステップでは、解像度を定義し、表面平滑化を有効にし、DSM作成のための補間処理を可能にします。.
詳細については、 DSM - PIX4Dmatic を
オルソモザイク
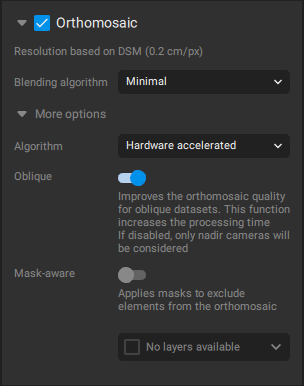
オルソモザイクとは、個々の画像を組み合わせることで生成される、非常に詳細かつリアルな現実世界の2次元表現です。オルソモザイクはデジタル表面モデル(DSM)から直接生成されるため、DSMに存在するエラーや欠落箇所はオルソモザイクにも反映されます。.
詳細については、 Orthomosaic - PIX4Dmatic を
出力
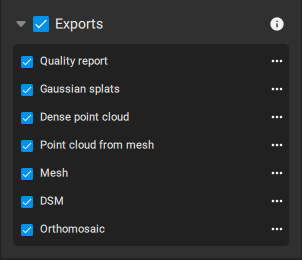
処理が完了すると、PIX4Dmaticのエクスポートウィンドウで以下の出力形式を選択できます。
- 品質レポート
- ガウス分布
- 高密度点群
- メッシュからの点群
- メッシュ
- デジタル表面モデル(DSM)
- オルソモザイク
エクスポートフォルダを探してください
出力ファイルにアクセスするには、 「ファイル」 、 「プロジェクトフォルダを開く」を選択します。 エクスポートされたファイルは「エクスポート」フォルダにあります。
詳細については、 出力 - PIX4Dmatic を参照し